CMake And Kconfig Based Build And Configuration System
Acronyms and Abbreviations
Acronym or Term |
Definition |
|---|---|
BS |
Build System |
BCS |
Build and Configuration System |
BCP |
Build and Configuration Process |
Environment Setup
Docker Support
An all-in-one docker image for all required packages can be find here
Repos Setup
Please make sure that all your code is up-to-date, please refer Bifrost.
Build Environment Setup
CMake
Since the BS uses CMake as the main build tool, please follow the CMake doc to install CMake. The minimum version is 3.30.0.
Ninja
The BS uses Ninja as the default output generator of CMake, please make sure you have installed the Ninja. The minimum ninja version is 1.12.1.
Python
Python is used as a Swiss knife in many aspects from repo management to BS. The minimum python version is 3.8.
Toolchain Setup
Build system supports IAR, MDK, Armgcc and Zephyr SDK to build.
You need to set environment variables to specify the toolchain installation so that build system can find it.
Here are the toolchain environment variable table
Toolchain |
Environment variable |
Example |
Cmd Line Argument |
|---|---|---|---|
IAR |
IAR_DIR |
C:\iar for Windows OR /opt/iarsystems/bxarm-9.40.2 for Linux |
–toolchain iar |
MDK |
MDK_DIR |
C:\Keil_v5 for Windows OR /usr/local/ArmCompilerforEmbedded6.21 for Linux |
–toolchain mdk |
MDK |
ARMCLANG_DIR |
C:\ArmCompilerforEmbedded6.22 for Windows OR /usr/local/ArmCompilerforEmbedded6.21 for Linux |
–toolchain mdk |
Armgcc |
ARMGCC_DIR |
C:\armgcc |
–toolchain armgcc(default) |
CodeWarrior |
CW_DIR |
C:\Freescale\CW MCU v11.2 |
–toolchain codewarrior |
Xtensa |
XCC_DIR |
C:\xtensa\XtDevTools\install\tools\RI-2023.11-win32\XtensaTools |
–toolchain xtensa |
Zephyr |
ZEPHYR_SDK_INSTALL_DIR |
–toolchain zephyr |
Note:
For MDK toolchain, only armclang compiler is supported. There are 2 environment variables MDK_DIR and ARMCLANG_DIR for it. Since most Keil users will install MDK IDE instead of standalone armclang compiler, the MDK_DIR has higher priority than ARMCLANG_DIR.
For Xtensa toolchain, please set XTENSA_CORE environment, depends on your devices, it can be
nxp_rt600_RI23_11_newlibornxp_rt500_RI23_11_newliband so on.
Kconfig
Please install python3 and menuconfig. For menuconfig, you can run with
pip install -U kconfiglib
Make sure that
mcu-sdk-boards,mcu-sdk-components,mcux-devices-kinetis,mcux-devices-lpc,mcux-devices-rtprojects are cloned because there are Kconfig data inside these repos for boards/components/devices. Only with all these data included, then you can enjoy full feature of kconfig.Run
Inside Kconfig files, there are board/device variables inside, so it cannot be directly run, so Kconfig shall be run inside whole cmake process.
Run cmake configuration
west build -b frdmk64f examples/demo_apps/hello_world --cmake-only
You can ignore
--cmake-only, then the project will be built.Run guiconfig target
west build -t guiconfig
Then you will get the Kconfig GUI launched, like
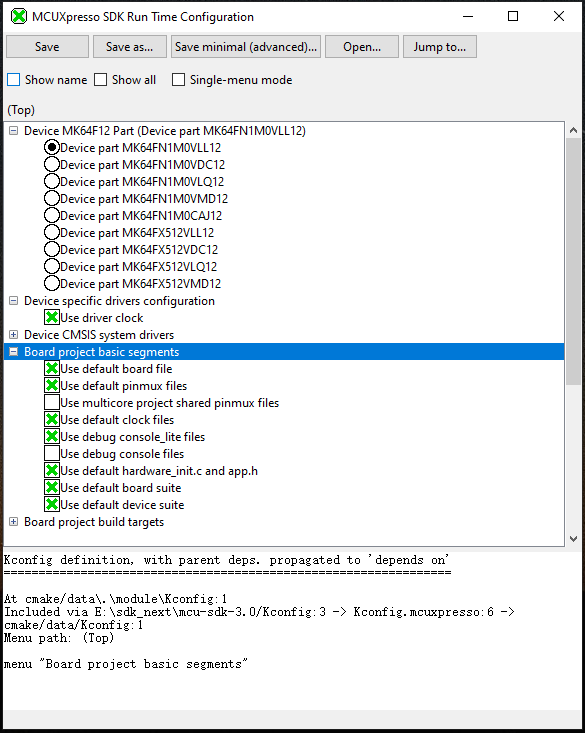
You can select/deselect and modify to do reconfiguration and remember to save.
After you save and close, you can directly run “west build” to do the build.
West Extension Commands
Build
Use west build -h to see help information for west build command.
Compared to zephyr’s west build, our west build command provides following additional options for mcux examples:
–toolchain: specify the toolchain for this build, default armgcc.
–config: value for CMAKE_BUILD_TYPE, default debug.
–show-configs: show all supported build configurations for the project.
Here are some typical usage for generating a SDK example is:
# Generate example with default settings
west build -b frdmk64f examples/demo_apps/hello_world
# Just print cmake commands, do not execute it
west build -b frdmk64f examples/demo_apps/hello_world --dry-run
# Generate other toolchain like iar, default armgcc
west build -b frdmk64f examples/demo_apps/hello_world --toolchain iar
# Generate config type, default debug
west build -b frdmk64f examples/demo_apps/hello_world --config release
# Show all supported build configurations
west build -b frdmk64f examples/demo_apps/hello_world --show-configs
For multicore devices, you shall specify the corresponding core id by passing the command line argument “-Dcore_id”. For example
west build -b evkmimxrt1170 examples/demo_apps/hello_world --toolchain iar -Dcore_id=cm7 --config flexspi_nor_debug
Remember to use “–config” to specify build target which is different from SDKGENv3.
For shield, please use the “–shield” to specify the shield to run, like
west build -b mimxrt700evk --shield a8974 examples examples/issdk_examples/sensors/fxls8974cf/fxls8974cf_poll -Dcore_id=cm33_core0
Sysbuild(System build)
To support multicore project building, we ported Sysbuild from Zephyr. It supports combining multiple projects for compilation. You can build all projects by adding “–sysbuild” for main application. For example:
west build -b evkmimxrt1170 --sysbuild ./examples/middleware/multicore/multicore_examples/hello_world/primary -Dcore_id=cm7 --config flexspi_nor_debug -p always
For more details, please refer to System build
Flash
Note: Please refer West Flash and Debug Support to enable west flash/debug support.
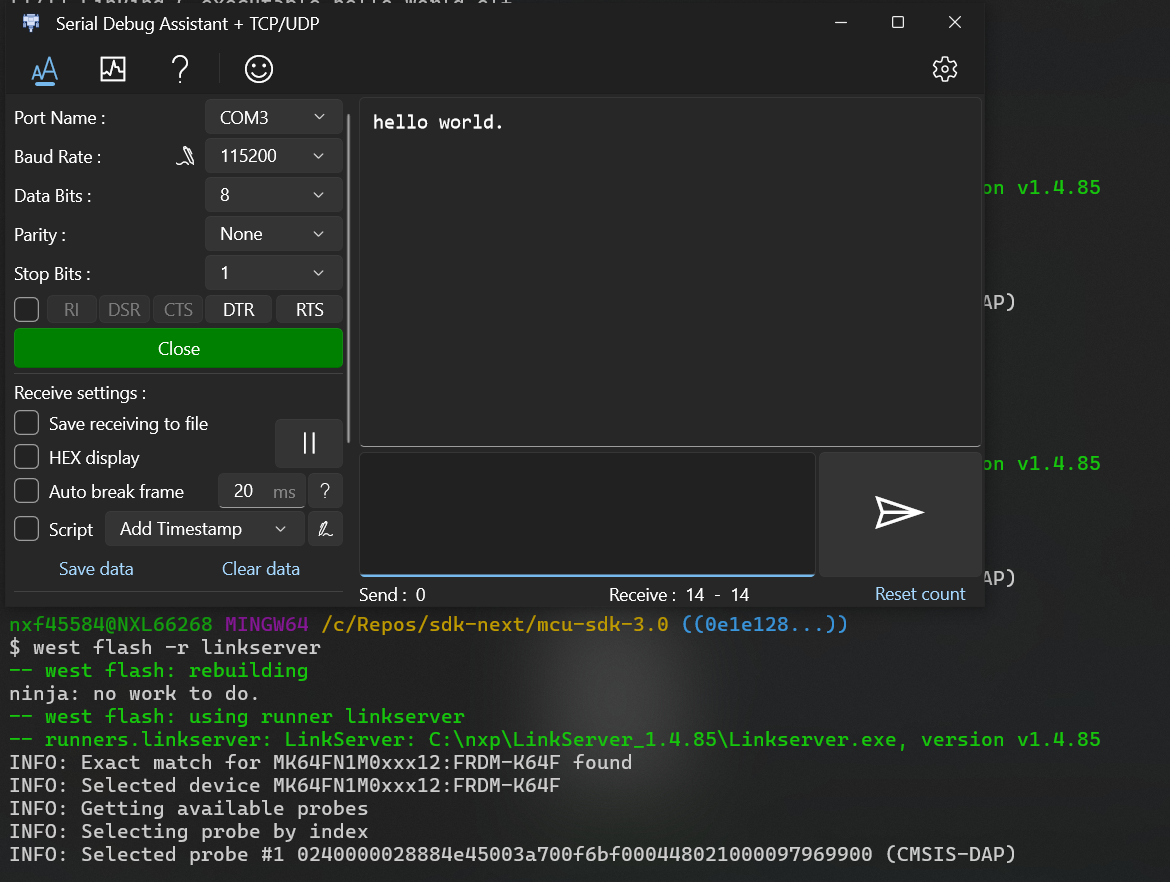
As we do not have a FRDM-K64F with JLink or other runners for test, we only ensure flash/debug commands can work for linkserver. Please install linkserver and add it to your PATH firstly.
Flash the hello_world example:
west flash -r linkserver
Debug
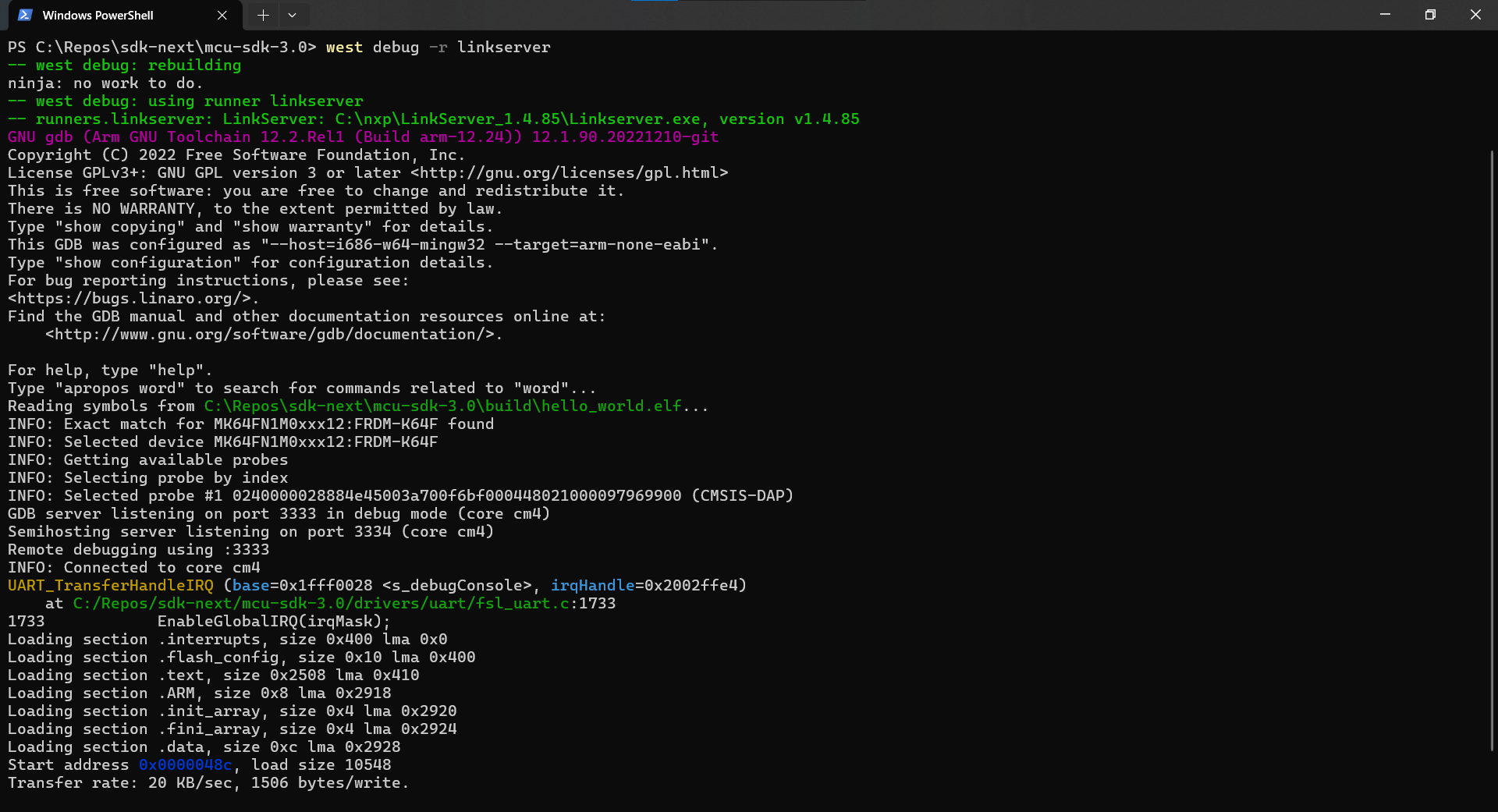
Start a gdb interface by following command:
west debug -r linkserver
Overview
MCUXpresso SDK build and configuration system is based on CMake and Kconfig.
Kconfig is a selection-based configuration system originally developed for the Linux kernel which now found more and more use in other projects beyond the Linux kernel. In MCUXpresso SDK, Kconfig is used to config the build in run time which includes component selection with dependency resolve, component configuration with feature enable, disable and customization.
You can interact with Kconfig via a curses or graphical menu interface, usually invoked by running west build -t guiconfig after you have already run passed the CMake configuration process. In this interface, the user selects the options and features desired, and saves a configuration file, which is then used as an input to the
build process.
CMake which is cross platform not only manages the software build process based on Kconfig result.
Beyond traditional CMake generation, MCUXpresso build system also integrates some useful functionalities like IDE project generation.
Toolchains Beyond GCC
MCUXpresso SDK supports all mainstream toolchains in the embedded world beyond traditional armgcc.
The toolchain list supported by our build system is armgcc, iar, mdk, xtensa and zephyr. The CMake toolchain setting files are placed in mcu-sdk-3.0/cmake/toolchain folder. All toolchain files generally follow the same structure and loaded through mcu-sdk-3.0/cmake/<toolchain>.cmake. The CMake variable for toolchain is CONFIG_TOOLCHAIN which is used to cmdline to specify the toolchain to build.
If you need to enable new toolchain, please follow the existing toolchain file pattern and place it there.
CMake Extension
MCUXpresso SDK is a comprehensive product including hundred of boards and devices, thousands of components and ten thousands of examples, all mainstream toolchains. The MCUXpresso CMake extensions aims to greatly reduce build data development and maintenance efforts.
Following extensions are provided for you to facilitate component, project and misc data record for all toolchains. All extension functions start with prefix mcux_
Source And Include
mcux_add_source/mcux_add_include
Add the source can be done with mcux_add_source.
For include path, the following functions are provided:
mcux_add_includeSet include path for all source code
mcux_add_asm_includeSet include path for assembly code
mcux_add_c_includeSet include path for C code
mcux_add_cpp_includeSet include path for CPP code
Please see following table for the arguments
Argument Name |
Argument Type |
Explanation |
|---|---|---|
BASE_PATH |
Single |
If provided, the final source path equals |
CONFIG |
Single |
Specify that the source is a config file. If build system finds a file with the same name, it can replace the config file. Please note if the config file is a header file, you need to record the file in |
PREINCLUDE |
Single |
Specify that the header is a preinclude header. This is only for mcux_add_source. |
EXCLUDE |
Single |
Specify the source shall be exluded from build. This is only for mcux_add_source |
SOURCES |
Multiple |
The sources. This is only for |
SCOPE |
Single |
Specify the source scope, can be INTERFACE/PUBLIC/PRIVATE. This is only for mcux_add_source and take same effect as target_sources scope. The default scope is PRIVATE if not set. |
INCLUDES |
Multiple |
The includes. This is only for |
TARGET_FILES |
Multiple |
This is only for |
COMPILERS |
Multiple |
The compilers. It means the source or include only supports the listed compilers. |
TOOLCHAINS |
Multiple |
The toolchains. It means the source or include only supports the listed toolchains. |
CORES |
Multiple |
The cores. It means the source or include only supports the listed cores. |
CORE_IDS |
Multiple |
The core_ids. It means the source or include only supports the listed core_ids. This is usually to distinguish support for core in multicore platform. |
DEVICES |
Multiple |
The devices. It means the source or include only supports the listed device, like MK64F12. |
DEVICE_IDS |
Multiple |
The device ids. It means the source or include only supports the listed device id, like MK64FN1M0xxx12. |
FPU |
Multiple |
The fpu. It means the source or include only supports the listed fpu. fpu enum values are NO_FPU, SP_FPU and DP_FPU. |
DSP |
Multiple |
The dsp. It means the source or include only supports the listed dsp. dsp enum values are NO_DSP and HAS_DSP |
TRUSTZONE |
Multiple |
The trustzone. It means the source or include only supports the listed trustzone. trustzone enum values are TZ and NO_TZ. |
COMPONENTS |
Multiple |
The components. It means the source or include only supports the listed components |
Wildcard “*.<extension>” is supported in mcux_add_source, frequently used would be “*.*”, “*.c” and “*.h”.
If the number of files is relatively small, it is not recommended to use wildcards because it is implicit and time consumed.
Here is one example:
# In drivers/uart/CMakelists.txt
if (CONFIG_MCUX_COMPONENT_driver.uart)
mcux_add_source(
SOURCES fsl_uart.h
fsl_uart.c
)
# with wildcard, it can be this way
# mcux_add_source(
# SOURCES *.*
# )
mcux_add_include(
INCLUDES .
)
endif()
# In examples/demo_apps/hello_world/CMakelists.txt
mcux_add_source(
SOURCES hello_world.c
)
mcux_add_include(
INCLUDES .
)
mcux_add_library
Specify the library to be linked.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
BASE_PATH |
Single |
If provided, the final library path equals |
LIBS |
Multiple |
The libraries to be added/removed |
SCOPE |
Single |
Specify the library scope, can be INTERFACE/PUBLIC/PRIVATE. This is only for mcux_add_library and take same effect as target_link_libraries scope. The default scope is PRIVATE if not set. |
TOOLCHAINS |
Multiple |
The toolchains. It means the library only supports the listed toolchains. |
CORES |
Multiple |
The cores. It means the library only supports the listed cores. |
CORE_IDS |
Multiple |
The core_ids. It means the library only supports the listed core_ids. This is usually to distinguish support for core in multicore platform. |
DEVICES |
Multiple |
The devices. It means the library only supports the listed device, like MK64F12. |
DEVICE_IDS |
Multiple |
The device ids. It means the library only supports the listed device id, like MK64FN1M0xxx12. |
FPU |
Multiple |
The fpu. It means the library only supports the listed fpu. fpu enum values are NO_FPU, SP_FPU and DP_FPU. |
DSP |
Multiple |
The dsp. It means the library only supports the listed dsp. dsp enum values are NO_DSP and HAS_DSP |
TRUSTZONE |
Multiple |
The trustzone. It means the library only supports the listed trustzone. trustzone enum values are TZ and NO_TZ. |
COMPONENTS |
Multiple |
The components. It means the library only supports the listed components |
GENERATED |
Single |
Mark the library is generated by other project, should be TRUE or FALSE. This is necessary for KEX package |
EXCLUDE |
Single |
Mark the library is exclude from linking, should be TRUE or FALSE. |
HIDDEN |
Single |
Mark the library is hidden from GUI project, should be TRUE or FALSE. |
TARGETS |
Multiple |
Mark the library is for designated build configuration targets. |
Here is one example
mcux_add_library(
LIBS lib/kw45b41/kw45b41_nbu_libthreadx.a
TOOLCHAINS iar
)
Note, the library can be also added by mcux_add_configuration, however, it requires the absolute path and does not support file scope or dependency condition. Therefore, mcux_add_library is preferred.
mcux_convert_binary
Specify the Output binary format
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TOOLCHAINS |
Multiple |
Supported toolchains |
BINARY |
Single |
The target output binary type |
Here is one example
mcux_convert_binary(
TOOLCHAINS armgcc mdk iar
BINARY ${APPLICATION_BINARY_DIR}/${MCUX_SDK_PROJECT_NAME}.bin
)
mcux_add_iar_linker_script/mcux_add_mdk_linker_script/mcux_add_armgcc_linker_script
Add linker for toolchain.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
The build targets, like debug release |
BASE_PATH |
Single |
If provided, the final linker path equals |
LINKER |
Single |
The linker path |
Here is one example
mcux_add_iar_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/iar/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.icf
)
mcux_add_armgcc_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/gcc/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.ld
)
mcux_add_mdk_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/arm/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.scf
)
Please remember to set “TARGETS” for the linker, otherwise the linker will be enabled for all targets.
MACRO
mcux_add_macro
It is recommended to use mcux_add_macro to set macros.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
TOOLCHAINS |
Multiple |
Supported toolchains. If not provided, then supporting all toolchains |
AS |
Single |
The assemble compiler macros |
CC |
Single |
The c compiler macros |
CX |
Single |
The cxx compiler macros |
Note:
mcux_add_macro automatically prefixes macros that do not have the -D prefix, duplicated macros will be removed
Here is one example
mcux_add_macro( CC "FOO -DFOO -D BAR=1" # Equals -DFOO -DBAR=1 )
For all macros added by mcux_add_configuration or mcux_add_macro, the duplicated macro name without value, like -DA -DA, or with same value, like -DC=3 -DC=3, only one macro will be kept. If found duplicated macro name with different value, use the latest one. You can also get notice from log.
If you want to set macro for assembler, c compiler and cpp compiler at the same time, you can set them three times. Or there is an easy way to omit AS/CC/CX parameters. Here is an example:
mcux_add_macro( "-DFOO -DBAR=1" )
mcux_add_linker_symbol
The CMake function mcux_add_configuration requires the complete toolchain setting. For linker macro setting, you have to add prefix for linker symbol. The prefix may be different for each linker. For example, --config_def= for iar, --predefine= for mdk. To be convenient for developer to set linker symbol once time for all toolchains, ``mcux_add_linker_symbol` is provided.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
SYMBOLS |
Single |
The linker symbols |
For example:
mcux_add_linker_symbol(
SYMBOLS "gUseNVMLink_d=1\
gEraseNVMLink_d=1\
_ram_vector_table_=1\
gFlashNbuImage_d=1\
gUseProdInfoLegacyMode_d=1"
)
Configuration
mcux_add_configuration
Add configuration for all toolchains with specified build targets.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
TOOLCHAINS |
Multiple |
Supported toolchains. If not provided, then supporting all toolchains |
LIB |
Multiple |
The library, the full path |
AS |
Single |
The assemble compiler flag |
CC |
Single |
The c compiler flags |
CX |
Single |
The cxx compiler flags |
LD |
Single |
The linker flags |
Note, please use native compiler flags of the compilers.
Here is one example
mcux_add_configuration(
TARGETS release
TOOLCHAINS IAR
AS "-M\"<>\" -w+ -s -j"
CC "--diag_suppress=Pa082,Pa050 --endian=little -e --use_c++_inline --silent"
CX "--diag_suppress=Pa082,Pa050 --endian=little -e --c++ --silent"
)
mcux_add_iar_configuration\mcux_add_mdk_configuration\mcux_add_armgcc_configuration\mcux_add_xcc_configuration
Very similar with mcux_add_configuration, just target specified toolchain, not for all.
Pre/Post Build Command
mcux_add_custom_command
CMake provide built-in function add_custom_command, this is useful for performing an operation before or after building the target by setting PRE_BUILD | PRE_LINK | POST_BUILD parameters. For more details, please refer to [CMake document](add_custom_command — CMake 3.30.3 Documentation). It shall only be used in the project CMakelists.txt, not the component one. Based on this function, meta build system provide customized CMake function mcux_add_custom_command to set pre/post build command for specific targets and toolchains.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
TOOLCHAINS |
Multiple |
Supported toolchains. If not provided, then supporting all toolchains |
BUILD_EVENT |
Single |
Set the time when the command is executed, can be PRE_COMPILE/PRE_BUILD/PRE_LINK /POST_BUILD. If not provided, the default setting is POST_BUILD |
BUILD_COMMAND |
Multiple |
Specify the command-line(s) to execute. The format is same as CMake built-in function add_custom_command, do not wrap the command with double quotes |
BYPRODUCTS |
Multiple |
Specify the files to be generated by command. It can be omitted if the directory of the generated files exist. |
WORKING_DIRECTORY |
Single |
Specify the working directory to execute the command. The default directory is ${CMAKE_BINARY_DIR} if not set. |
Here is one example
mcux_add_custom_command(
TARGETS debug release
TOOLCHAINS armgcc
BUILD_EVENT PRE_BUILD
BUILD_COMMAND ${TOOLCHAIN_DIR}/bin/arm-none-eabi-gcc -E -P -xc -I${SdkRootDirPath}/middleware/tfm/tf-m/platform/ext/target/nxp/evkmimxrt685/partition -I${SdkRootDirPath}/middleware/tfm/tf-m/platform/ext/common ${SdkRootDirPath}/middleware/tfm/tf-m/platform/ext/common/gcc/tfm_common_ns.ld -o ${SdkRootDirPath}/middleware/tfm/tf-m/platform/ext/common/gcc/tfm_common_ns_pre.ld
)
Note: According to add_custom_command — CMake 3.30.0 Documentation , for Ninja and Make generator, the PRE_BUILD behaves the same as PRE_LINK. Therefore, If you want to create files which is used for compilation, meta build system has provided a specific build event parameter “PRE_COMPILE” to simplify and unify custom command setting. For example:
mcux_add_custom_command(
BUILD_EVENT PRE_COMPILE
BUILD_COMMAND
sh ../middleware/wireless/zigbee/tools/ZPSConfig/Source/ZPSConfig
-n coordinator
-e LITTLE_ENDIAN
-t JN518x
-l ../middleware/wireless/zigbee/platform/K32W1/libs/libZPSNWK.a
-a ../middleware/wireless/zigbee/platform/K32W1/libs/libZPSAPL.a
-f ../middleware/wireless/zigbee/examples/zigbee_coordinator/src/coordinator.zpscfg
-o ../middleware/wireless/zigbee/examples/zigbee_coordinator/src/
BYPRODUCTS
../middleware/wireless/zigbee/examples/zigbee_coordinator/src/zps_gen.c
../middleware/wireless/zigbee/examples/zigbee_coordinator/src/zps_gen.h
)
You will see the log:
-- west build: building application
[1/23] Pre-compile command: sh ../middleware/wireless/zigbee/tools/...g -o ../middleware/wireless/zigbee/examples/zigbee_coordinator/src
Remove
Except adding data, the build system also supports removing defined data. For example, if in a common definition, a macro is defined for examples in the board, but your example cannot use it, then you can use following remove function to remove it.
mcux_remove_configuration
Remove configuration for all toolchains with specified build targets.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
TOOLCHAINS |
Multiple |
Supported toolchains. If not provided, then supporting all toolchains |
LIB |
Multiple |
The library, the full path |
AS |
Single |
The assemble compiler flag |
CC |
Single |
The c compiler flags |
CX |
Single |
The cxx compiler flags |
LD |
Single |
The linker flags |
Note, please use native compiler flags of the compilers.
Here is one example
mcux_remove_configuration(
TARGETS release
AS "-DMCUXPRESSO_SDK -DNDEBUG"
CC "-DMCUXPRESSO_SDK -DNDEBUG"
CX "-DMCUXPRESSO_SDK -DNDEBUG"
)
mcux_remove_iar_configuration/mcux_remove_mdk_configuration/mcux_remove_armgcc_configuration
Very similar with mcux_remove_configuration, just target specified toolchain, not for all.
mcux_remove_macro
Remove macros for all toolchains with specified build targets.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all targets |
TOOLCHAINS |
Multiple |
Supported toolchains. If not provided, then supporting all toolchains |
AS |
Single |
The assemble compiler macros |
CC |
Single |
The c compiler macros |
CX |
Single |
The cxx compiler macros |
Note, mcux_remove_macro automatically prefixes macros that do not have the -D prefix Here is one example
mcux_remove_macro(CC "TESTMACRO")
mcux_remove_linker_symbol
Remove linker symbol for all toolchains with specified build targets.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
Supported build targets. If not provided, then supporting all target |
SYMBOLS |
Single |
The linker symbols to be removed |
Here is one example
mcux_remove_linker_symbol(
SYMBOLS "gFlashNbuImage_d=1"
)
mcux_remove_iar_linker_script/mcux_remove_mdk_linker_scriptmcux_remove_armgcc_linker_script
Argument Name |
Argument Type |
Explanation |
|---|---|---|
TARGETS |
Multiple |
The build targets, like debug release |
BASE_PATH |
Single |
If provided, the final linker path equals BASE_PATH + LINKER. This is usually used in abstracted .cmake files which are not placed together with real linker. |
LINKER |
Single |
The linker path |
Here is one example
mcux_remove_iar_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/iar/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.icf
)
mcux_remove_armgcc_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/gcc/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.ld
)
mcux_remove_mdk_linker_script(
TARGETS debug release
BASE_PATH ${SdkRootDirPath}
LINKER devices/${soc_portfolio}/${soc_series}/${device}/arm/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.scf
)
mcux_project_remove_include\mcux_project_remove_source
Remove project source or include.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
BASE_PATH |
Single |
If provided, the final source path equals |
INCLUDES |
Multiple |
The include path. |
SOURCES |
Multiple |
The source path. |
Here is one example
mcux_project_remove_source(
SOURCES hello_world.c
)
mcux_project_remove_include(
INCLUDES .
)
mcux_remove_library
Remove libraries. Whether the file was added before or after this statement, it will take effect.
Argument Name |
Argument Type |
Explanation |
|---|---|---|
BASE_PATH |
Single |
If provided, the final source path equals |
LIBS |
Multiple |
The library files to be removed |
Here is one example
mcux_remove_library(
BASE_PATH ${SdkRootDirPath}
SOURCES devices/${soc_portfolio}/${soc_series}/${device}/iar/iar_lib_power.a
)
Misc
mcux_set_variable
Set variable with global scope. It requests that variable defined by mcux_set_variable must be unique. Build system will give error if there are duplication variable defined with “mcux_set_variable”.
Here is one example
mcux_set_variable(soc_series Kinetis)
mcux_set_list
Set a cmake list.
Here is one example
mcux_set_list(KW47_FAMILY "KW47B42Z83xxxA KW47B42Z96xxxA KW47B42Z97xxxA KW47B42ZB2xxxA KW47B42ZB3xxxA KW47B42ZB6xxxA KW47B42ZB7xxxA KW47Z42082xxxA KW47Z42092xxxA KW47Z420B2xxxA KW47Z420B3xxxA")
mcux_add_cmakelists
Add CMakelists.txt
Here is one example
mcux_add_cmakelists(${SdkRootDirPath}/devices/Kinetis/MK64F12/drivers)
mcux_load_all_cmakelists_in_directory
Load all cmakelists under one directory
mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/drivers)
SDK Data
Data File Types
The SDK data is recorded in CMake and Kconfig. CMake holds most build data like sources, includes, static configurations while Kconfig holds component dependencies and run time configurations.
Since Kconfig data are configurable, then there are 3 ways to provide the configure values
Kconfig default value
Inside the Kconfig file, for each symbol, default value must be provided. In this way, any symbol will anyway gets a default value in any cases.
prj.conf
For visible Kconfig symbols, you can directly set symbol=value in
prj.confto do the configuration. Theprj.confs placed in designated places will be taken as Kconfig process input with priority. Please refer prj.conf for details.Kconfig.defconfig
For invisible Kconfig symbols, prj.conf won’t take effect. Please use
Kconfig.defconfto redefine the symbol without type but with new default value.Note,
Kconfig.defconfigwill is actually repeatedly define Kconfig symbols. They are only supported in board and device reconfiguration. Please don’t use it in your examples customization.
Principles
There are 2 principles for MCUXpresso SDK data
Componentization
SDK data is recorded and used in a
componentway instead of fragment lines. There are several component types each of which in data record is a data section. Please refer Data Section chapter for details.In this way software is highly modularized thus greatly improve the integration.
Decoupling.
There are many kinds SDK data: boards, devices, drivers, components, middlewares, examples, etc. Different type data are strictly decoupled from each other and prepared separately.
In this way, migrability is highly addressed and achieved. When adding a driver, you don’t need to care about examples. When adding an example, you don’t need to care about board or device data like pinmux or clock.
So please don’t mix data during the developments.
Data Section
Each data section is composed of CMake and Kconfig.
3 data section types are supported: component, project segment and project.
Component
“component” section is used for software components.
In CMake, component data shall be recorded inside a if-endif guard. The if condition shall be with prefix CONFIG_MCUX_COMPONENT to specify the following data belongs to a software component. The component name is right next to it.
Here is one driver.uart component cmake data:
if (CONFIG_MCUX_COMPONENT_driver.uart) # component name
# component data
mcux_add_source(
SOURCES fsl_uart.h
fsl_uart.c
)
mcux_add_include(
INCLUDES .
)
endif()
If a component definition is split into several CMake files, please use the same if-endif guard in all files data.
In Kconfig, symbol for a component shall also start with MCUX_COMPONENT_ to be identical with CMake component name.
Component configuration and dependency shall be recorded following the below pattern:
config MCUX_HAS_COMPONENT_driver.uart
bool
default y if MCUX_HW_IP_DriverType_UART
config MCUX_COMPONENT_driver.uart
bool "Use driver uart"
select MCUX_COMPONENT_driver.common
depends on MCUX_HAS_COMPONENT_driver.uart # component dependency
# Configuration for driver.uart shall be put into the if-endif so that only driver.uart is selected, the configuration will be showed
if MCUX_COMPONENT_driver.uart
# Configuration for driver.gpio
endif
About the dependency, please refer Complex Dependency In Kconfig chapter for details.
For multiple components belonging to one middleware set, please use Kconfig “menu” to gather them together, like
menu "freertos-kernel(FreeRTOSConfig.h)"
config MCUX_COMPONENT_middleware.freertos-kernel
bool "middleware.freertos-kernel"
select MCUX_COMPONENT_middleware.freertos-kernel.extension
config MCUX_COMPONENT_middleware.freertos-kernel.extension
bool "tad extension"
config MCUX_COMPONENT_middleware.freertos-kernel.heap_1
bool "heap 1"
config MCUX_COMPONENT_middleware.freertos-kernel.heap_2
bool "heap 2"
config MCUX_COMPONENT_middleware.freertos-kernel.heap_3
bool "heap 3"
config MCUX_COMPONENT_middleware.freertos-kernel.heap_4
bool "heap 4"
config MCUX_COMPONENT_middleware.freertos-kernel.heap_5
bool "heap 5"
......
endmenu
Project Segment
MCUXpresso SDK is composed of hundreds of devices and boards, thousands of components and ten thousands of projects. Projects on these boards and devices have many shared data like core related settings, common build target settings, device headers and configurations, board files, clock and pinmux. Project segment data section is an abstraction of common shared data. It is introduced to avoid data duplication.
Like the component, in CMake, project segment data shall also be recorded inside a if-endif guard. The if condition shall be with prefix CONFIG_MCUX_PRJSEG_, right after it is the project segment name.
Here is the frequently used and prepared project segments table.
Project Segment Name |
Location |
Functionality |
|---|---|---|
CONFIG_MCUX_PRJSEG_config.arm.shared |
arch/arm/configuration |
The commonly shared configuration by all examples of ARM platforms |
CONFIG_MCUX_PRJSEG_config.kinetis.shared |
arch/arm/configuration |
The commonly shared configuration by all examples of kinetis platforms |
CONFIG_MCUX_PRJSEG_config.arm.core. |
arch/arm/cortexm |
The ARM core settings |
CONFIG_MCUX_PRJSEG_config.arm.core.fpu. |
arch/arm/cortexm |
The ARM core fpu settings |
CONFIG_MCUX_PRJSEG_config.device_core.define |
arch/arm/cortexm |
The core CPU macro definition |
CONFIG_MCUX_PRJSEG_target. |
arch/arm/target |
Build configuration target |
CONFIG_MCUX_PRJSEG_module.board. |
boards/common |
Commonly shared board modules like board file, pinmux, clock config, etc. |
CONFIG_MCUX_PRJSEG_project. |
boards/common |
Commonly shared project modules like hardware init app. etc. |
Here is one project segment CMake example:
if (CONFIG_MCUX_PRJSEG_module.board.clock)
mcux_add_source(
BASE_PATH ${SdkRootDirPath}
SOURCES boards/${board}/clock_config.h
boards/${board}/clock_config.c
)
mcux_add_include(
BASE_PATH ${SdkRootDirPath}
INCLUDES boards/${board}
)
endif()
In Kconfig, symbol for a project segment shall start with MCUX_PRJSEG_ to be identical with CMake project segment name. Project segment configuration and dependency shall be recorded following the below pattern:
config MCUX_PRJSEG_module.board.clock
bool "Use default clock files"
imply MCUX_COMPONENT_driver.clock
if MCUX_PRJSEG_module.board.clock
endif
Unlike the component dependency, the dependency for project segment is simple, just several parallel imply to state that the project segment depends on some components and maybe other project segment to work. Since it is frequently occuring cases that some examples on certain boards need to customize some project segment dependencies, please use imply instead of select for project segment dependencies because select once true then cannot be deselected anymore.
Project
Just like the native CMake way, all data inside CMakeLists.txt with project macro inside is a project segment.
Compared to the native project, the customized project provides the following additional parameters:
Argument Name |
Argument Type |
Explanation |
|---|---|---|
PROJECT_BOARD_PORT_PATH |
Single |
Path for board-specific and project-specific files. Generally, this folder will contain hardware_init.c and app.h |
PROJECT_TYPE |
Single |
Specify the project type, can be ” EXECUTABLE” or “LIBRARY”. The default type is ” EXECUTABLE” if not set. |
CUSTOM_PRJ_CONF_PATH |
Multiple |
Specify customized prj.conf search path. Please refer toprj.conf |
Here is one project CMake example
cmake_minimum_required(VERSION 3.30.0)
include(${SdkRootDirPath}/cmake/extension/mcux.cmake)
# Specify the project
project(hello_world LANGUAGES C CXX ASM PROJECT_BOARD_PORT_PATH examples/_boards/${board}/demo_apps/hello_world)
# Include device, board, drivers/components, middlewares
include(${SdkRootDirPath}/CMakeLists.txt)
include(${SdkRootDirPath}/examples/demo_apps/reconfig.cmake OPTIONAL)
include(${SdkRootDirPath}/${project_board_port_path}/reconfig.cmake OPTIONAL)
mcux_add_source(
SOURCES hello_world.c
)
mcux_add_include(
INCLUDES .
)
# convert binary to .bin.
mcux_convert_binary(BINARY ${APPLICATION_BINARY_DIR}/${MCUX_SDK_PROJECT_NAME}.bin)
For project, it is not required to provide example specific Kconfig. If your example has specific Kconfig, then please follow the pattern to add it.
rsource "../../../Kconfig.mcuxpresso"
mainmenu "Hello world Example Run Time Configuration"
config HELLO_WORLD_EXAMPLE_MACRO
bool
default y
help
"Hello world example macro"
rsource "../../../Kconfig.mcuxpresso"must be added to load all repo Kconfigs because Kconfig.mcuxpresso is assembly point for Kconfigs.Set
mainmenuto give the GUI titleSet your example specific configurations
Note, the Kconfig process will take example specific Kconfig as entry point with priority. If not provided, then take the <mcu-sdk-3.0>/Kconfig instead. So if your example doesn’t have Kconfig contents, please don’t keep it.
Dependency
BS provided dependencies record and resolve for both sections(project and components) and sources.
Section Level Dependency
Kconfig dependency mechanism and tool is used to describe and resolve section level dependency.
Dependency Mechanisms
Kconfig provides depends on, select and choice dependency mechanisms.
“depends on”
It defines a dependency for Kconfig symbol. If multiple dependencies are defined, they can be connected with ‘&&’, ‘||’, and ! for NOT.
The Kconfig item won’t be showed if the “depends on” is not satisfied.
“select”
It forces a symbol to true which means the depended component is selected anyway no matter the dependency is satisfied or not.
“choice”
It defines a choice group. The single choice can only be of type bool or tristate. If no type is specified for a choice, its type will be determined by the type of the first choice element in the group or remain unknown if none of the choice elements have a type specified.
Kconfig processor in BCS will give detailed warnings about unsatisfied component selection so that you can immediately find it and fix.
Practice Recommendation
For software components depending on hardware related dependency items like board, device, device_id, please use
depends on. If not satisfied, the related components will not be showed so that not bloat the Kconfig GUI list.For software components depending on software component, priority to use
select. It helps to auto select component dependency.For cycle dependency case like FOO needs to “select” BAR and BAR needs to “select” FOO, since Kconfig doesn’t support cycle dependency, so you cannot use mutually “select” between FOO and BAR. The recommendation is use both “select” and “depends on”. For example, FOO “select” BAR and BAR “depends on” FOO. In this way, when you tick FOO, then BAR will be automatically selected. When FOO dependency is not satisfied, BAR cannot be showed.
If there are
any ofdependencies,choicecan satisfy the needs, please see Dependency Patterns
Dependency Items
Except for software components, following dependency items are provided.
Dependency Item |
Illustration |
|---|---|
MCUX_HW_DEVICE_<device> |
Device, like MK64F12 |
MCUX_HW_DEVICE_ID_<device_d> |
Device id, like MK64FN1M0xxx12 |
MCUX_HW_CORE_<core_name> |
Core name, like cm4f |
MCUX_HW_CORE_ID_<core_id> |
Core id, like cm33_core0 |
MCUX_HW_BOARD_<board name> |
Board name, like frdmk64f |
MCUX_HW_KIT_<kit name> |
Kit name, like frdmk64f_agm01 |
MCUX_HW_<fpu type> |
fpu type name, like MCUX_HW_FPV4_SP |
MCUX_HW_DSP |
DSP |
MCUX_HW_MPU |
MPU |
MCUX_HW_<secure type> |
Secure or nonsecure, like MCUX_HW_SECURE, MCUX_HW_NONSECURE |
MCUX_HW_<trustzone type> |
Trustzone type, like MCUX_HW_TZ, MCUX_HW_NO_TZ |
All these dependency items shall be defined in device Kconfig.chip.
Dependency Patterns
Here are summarized frequently used dependency patterns.
Pattern1: start with allOf, with one level anyOf and not
componentA: allOf: - component1 - component2 - anyOf: - component3 - component4 - anyOf: - component5 - component6 - not: device: - MK64F12 - MK63F12
The recommended dependency patterns for this.
config MCUX_COMPONENT_componentA bool "Component A, pattern 1" select MCUX_COMPONENT_component1 select MCUX_COMPONENT_component2 depends on !MCUX_HW_DEVICE_MK64F12 && !MCUX_HW_DEVICE_MK63F12 # not choice prompt "Component A anyOf1" default MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_1 config MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_1 bool "Select component3" select MCUX_COMPONENT_component3 config MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_2 bool "Select component4" select MCUX_COMPONENT_component4 endchoice choice prompt "Component A anyOf2" default MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_3 config MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_3 bool "Select component5" select MCUX_COMPONENT_component5 config MCUX_DEPENDENCY_COMPONENT_componentA_DEPEND_ANYOF_4 bool "Select component6" select MCUX_COMPONENT_component6 endchoice
Pattern 2: start with allOf, with 2 level anyOf/allOf
componentB: dependency: allOf: - component1 - component2 - compiler: - iar - mdk - anyOf: - allOf: - component3 - component4 - device: - MK64F12 - MK63F12 - allOf: - component5 - component6 - device: - LPC54005 - LPC54016
The Kconfig dependency pattern is like
config MCUX_COMPONENT_componentB bool "Component B, pattern 2 choise" select MCUX_COMPONENT_component1 select MCUX_COMPONENT_component2 depends on MCUX_COMPILER_IAR || MCUX_COMPILER_MDK # All device scope shall be explicitly specified here, otherwise for a device which is not in the scope which means the dependency is not satisfied, but componentC is still showed and configurable depends on MCUX_HW_DEVICE_MK64F12 || MCUX_HW_DEVICE_MK63F12 || MCUX_HW_DEVICE_LPC54005 || MCUX_HW_DEVICE_LPC54016 if MCUX_COMPONENT_componentB choice prompt "ComponentB anyOf" default MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_1 config MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_1 bool "Select component3 and component 4 in device MK64F12, MK63F12" select MCUX_COMPONENT_component3 select MCUX_COMPONENT_component4 depends on MCUX_HW_DEVICE_MK64F12 || MCUX_HW_DEVICE_MK63F12 config MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_2 bool "Select component5 and component4" select MCUX_COMPONENT_component5 select MCUX_COMPONENT_component6 depends on MCUX_HW_DEVICE_LPC54005 || MCUX_HW_DEVICE_LPC54016 endchoice endif
If under each allOf, there is only one component, then you can use “select”
componentB: dependency: allOf: - component1 - component2 - compiler: - iar - mdk - anyOf: - allOf: - component3 - device: - MK64F12 - MK63F12 - allOf: - component5 - device: - LPC54005 - LPC54016
config MCUX_COMPONENT_componentB bool "Component B, pattern 2 select" select MCUX_COMPONENT_component1 select MCUX_COMPONENT_component2 depends on MCUX_COMPILER_IAR || MCUX_COMPILER_MDK # All device scope shall be explicitly specified here, otherwise for a device which is not in the scope which means the dependency is not satisfied, but componentC is still showed and configurable depends on MCUX_HW_DEVICE_MK64F12 || MCUX_HW_DEVICE_MK63F12 || MCUX_HW_DEVICE_LPC54005 || MCUX_HW_DEVICE_LPC54016 select MCUX_COMPONENT_component3 if MCUX_HW_DEVICE_MK64F12 || MCUX_HW_DEVICE_MK63F12 select MCUX_COMPONENT_component5 if MCUX_HW_DEVICE_LPC54005 || MCUX_HW_DEVICE_LPC54016
Pattern 3: start with anyOf, with one level allOf
componentE: dependency: anyOf: - allOf: - component1 - component2 - core: - cm4 - cm4f - device: - MK64F12 - MK63F12 - allOf: - component3 - component4
The Kconfig dependency pattern is like
config MCUX_COMPONENT_componentC bool "Component C, pattern 3" if MCUX_COMPONENT_componentC choice prompt "Component C anyOf" default MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_component1_component2 config MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_component1_component2 bool "Select component1 and component2" select MCUX_COMPONENT_component1 select MCUX_COMPONENT_component2 depends on MCUX_HW_CORE_CM4 || MCUX_HW_CORE_CM4F depends on MCUX_HW_DEVICE_MK64F12 || MCUX_HW_DEVICE_MK63F12 config MCUX_DEPENDENCY_COMPONENT_componentC_DEPEND_ALLOF_component3_component4 bool "Select component3 and component4" select MCUX_COMPONENT_component3 select MCUX_COMPONENT_component4 endchoice endif
Source Level Dependency
Source level dependency is achieved through the CMake extension, like
mcux_add_source(
SOURCES portable/GCC/ARM_CM0/port.c
# The following 2 lines mean port.c only supports cm0p core and toolchain armgcc, mcux and mdk
CORES cm0p
TOOLCHAINS armgcc mcux mdk
)
Please refer the mcux_add_source/mcux_add_include extension arguments for supported dependency items.
IDE Related
The meta build system support GUI project, the build information of assembler/compiler/linker comes from artifacts of CMake configuration, more specifically, the build.ninja file. However, it is not enough for build system. Since the IDE will provide rich download debugging capabilities, we need to record this additional information.
The IDE related data are recorded in IDE.yml. These yml files are are automatically loaded and merged by the meta build system in a certain order and do not need to be manually loaded by the user. The loading sequence is:
devices/IDE.yml
devices/<soc_series>/IDE.yml
devices/<soc_series>/<device>/IDE.yml
devices/<soc_series>/<device>/<core_id>/IDE.yml
examples/IDE.yml
examples/_boards/IDE.yml
examples/_boards/<board>/IDE.yml
examples/_boards/<board>/<core_id>/IDE.yml
examples/<example_category>/IDE.yml
examples/<example_category>/<example>/IDE.yml
examples/_boards/<board>/<example_category>/IDE.yml
examples/_boards/<board>/<example_category>/<example>/IDE.yml
examples/_boards/<board>/<example_category>/<example>/<core_id>/IDE.yml
For shield, it is like
devices/IDE.yml
devices/<soc_series>/IDE.yml
devices/<soc_series>/<device>/IDE.yml
devices/<soc_series>/<device>/<core_id>/IDE.yml
examples/IDE.yml
examples/_boards/IDE.yml
examples/_boards/<board>/IDE.yml
examples/_boards/<board>/<core_id>/IDE.yml
examples/<shield_example_category>/IDE.yml
examples/<shield_example_category>/<example>/IDE.yml
examples/_boards/<board>/<shield>/IDE.yml
examples/_boards/<board>/<shield>/<shield_example_category>/IDE.yml
examples/_boards/<board>/<shield>/<shield_example_category>/<example>/IDE.yml
examples/_boards/<board>/<shiedl>/<shield_example_category>/<example>/<core_id>/IDE.yml
Note:
These loading files are optional, there is no problem even if it is not provided
The settings in IDE.yml will be merged as load sequence. If same setting is set in different files, settings loaded later will override settings loaded earlier, no matter setting data value structure is string, boolean or array. For example, there are two data sections:
# load firstly
A:
B:
- B1
- B2
C: C1
D: true
E: E1
# load secondly
A:
B:
- B3
C: C2
D: false
F: F1
This two sections will be merged to:
A:
B:
- B3
C: C2
D: false
E: E1
F: F1
There are 3 kinds of IDE data: project templates, IDE option and Special functional files.
Project templates
The project template files are the most basic and original IDE definition files for GUI project generation. All IDE settings are set based on these files. We have prepared project template files in advance, which are located in the mcu-sdk-3.0/scripts/guigenerator/templates, for example
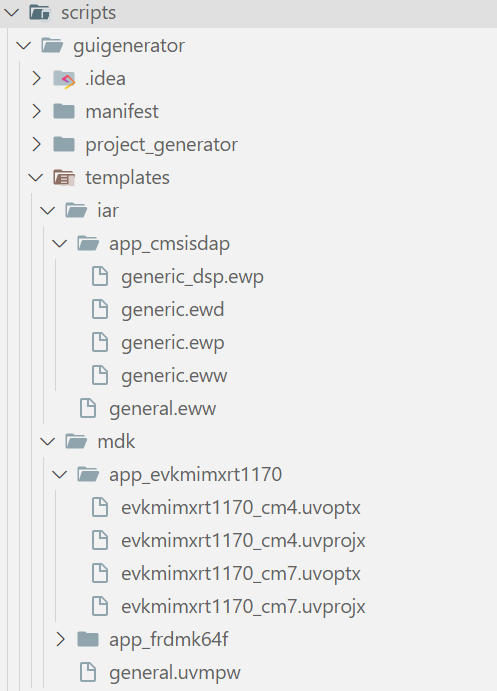
Currently, only IAR and Keil MDK are supported. For IAR, the *.ewp and *.ewd are necessary. For Keil MDK, we have provided project template files for each board, you need to set *.uvprojx and *.uvoptx.
To record such files in CMake, you need to record them under specific toolchain with “project-templates” field.
If you want to replace previous setting, just reset the setting in files loaded later
Here is the example:
# sdk-next/mcu-sdk-3.0/boards/evkmimxrt1170/cm7/IDE.yml
mdk:
project-templates:
- scripts/guigenerator/templates/mdk/app_evkmimxrt1170/app_evkmimxrt1170.uvprojx
- scripts/guigenerator/templates/mdk/app_evkmimxrt1170/app_evkmimxrt1170.uvoptx
iar:
project-templates:
- scripts/guigenerator/templates/iar/app_cmsisdap/generic.ewp
- scripts/guigenerator/templates/iar/app_cmsisdap/generic.ewd
- scripts/guigenerator/templates/iar/general.eww
# sdk-next/mcu-sdk-3.0/boards/evkmimxrt1170/demo_apps/hello_world/cm7/IDE.yml
iar:
project-templates: # Accodring to load sequence, this setting will take effect
- scripts/guigenerator/templates/iar/app_jlinkswd/generic.ewp
- scripts/guigenerator/templates/iar/app_jlinkswd/generic.ewd
- scripts/guigenerator/templates/iar/general.eww
IDE option
In general, IDEs support some special debugging settings, which are not implemented in the native CMake build system. For example, IAR support to selects the reset strategy to be used when the debugger starts, Keil MDK support to load application at startup, etc.
You can set IDE option for specific toolchain and specific target. If the setting is for all targets, please set it under __common__
Here is the example:
# sdk-next/mcu-sdk-3.0/boards/evkmimxrt1170/cm7/IDE.yml
iar:
config:
__common__:
debugger_setting:
cmsisdap_resetlist: software
Note: If you want to replace the setting with the new one, just reset it in files loaded later.
For details of commonly used option settings, please refer to IDE Option Setting
Special functional scripts
Some IDEs may use scripts to initialize the compilation environment before and after the compilation phase, or to process the image files generated by the compilation, or to initialize the flash before the start of debugging, etc. So we need to support the recording of these scripts in IDE.yml.
You can set a script in “files” field inside a section with attribute:
toolchains: The toolchain targeted by the IDE script
targets: The build configuration targeted by the IDE scripts, such as debug/release/flexspi_nor_debug/flexspi_nor_release, etc.
source: The relative path of the IDE script
attribute: The attribute of the script, Represents the function of the script
Here is the example:
macro-file: #setction name
files:
- source: examples/_boards/${board}/evkmimxrt1170_cm7.mac
attribute: macro-file
toolchains: iar
Note: If you want to replace the script with the new one, please record them in files loaded later. To prevent replacing just one script and re-writing all the others, it is not recommended to record all files in one section. It’s best to put only one file in a section. For example:
macro-file: #setction name
files:
- source: examples/_boards/${board}/evkmimxrt1170_connect_cm7.mac
attribute: macro-file
toolchains: iar
For details of supported attribute file, please refer to IDE Script Setting
Variables
Variable mechanism is introduced to facilitate data record in both CMake and Kconfig for MCUXpresso SDK.
For example, in CMake with a board variable in the source, one copy of the following project segment data can be shared by all boards examples without any duplication.
if (CONFIG_MCUX_PRJSEG_module.board.suite)
mcux_add_source(
BASE_PATH ${SdkRootDirPath}/examples/_boards/${board} # "board" variable shall be defined in each board so that each board can use this project segment
SOURCES dcd.c dcd.h
)
endif()
In Kconfig, the same board variable can set the board Kconfig path for all boards.
rsource "${board}/Kconfig"
There are some required variables which must be provided for each build to make the CMake configuration process run passed.
Besides, customized variables are allowed for some software data recorded although not suggested.
Required Variables
There are some required variables which shall be defined in advance to make the BCP workable. These variables are generally related to hardware related information.
In the BS, all these required variables can be defined in CMake to make the build work, but to enable the switch across device parts in run time in Kconfig, most hardware related variables are moved into Kconfig.chip because Kconfig mechanism can make sure that when you switch device part, all related variables can be switch at the same time.
Here is the CMake stored variable table:
Variable Name |
Explanation |
Acquisition |
Used in |
Usage |
|---|---|---|---|---|
SdkRootDirPath |
SDK root directory |
Automatically set by BS |
CMake |
Secify sdk root path like |
board |
board name, like frdmk64f |
Provided in cmdline argument, also need to record it in board variable cmake |
CMake and Kconfig |
Specify the target board, like |
device |
device name, like MK64F12 |
Device variable cmake |
CMake and Kconfig |
Specify the target device, like |
core_id |
Core id, like cm33_core0 |
Device variable cmake. This is only required for multicore device. |
Kconfig |
Specify the core_id, like |
core_id_suffix_name |
Core id suffix name |
Device variable cmake |
CMake |
Unify data record across single core and multicore device. For example, for the same hello_world project name, in multicore device, it is may called hello_world_cm4 and hello_world_cm7 while in single core device, it is may called hello_world, then “hello_world${core_id_suffix_name}” can work for all cases. For cm4 core, it can be “_cm4”, for cm7 core, it can be “_cm7”, for single core, it can be “” |
multicore_foldername |
multicore folder name |
Device variable cmake |
CMake |
Unify data record across single core and multicore device. For example, for the same hello_world project root, in multicore device evkmimxrt1170, it is boards/evkmimxrt1170/demo_apps/hello_world/cm4 and boards/evkmimxrt1170/demo_apps/hello_world/cm7 while in single core board frdmk64f, it is boards/frdmk64f/demo_apps/hello_world, then “boards/evkmimxrt1170/demo_apps/hello_world/${multicore_foldername}” can work for all cases. For cm4 core, it can be “cm4”, for cm7 core, it can be “cm7”, for single core, it can be “.” |
soc_series |
soc series |
Soc series cmake |
CMake |
Specify the soc series, like |
The above variables shall anyway be provided in CMake because they are used before Kconfig process.
Here is the Kconfig stored variable table:
Variable Name |
Explanation |
Acquisition |
Used in |
Usage |
|---|---|---|---|---|
CONFIG_MCUX_HW_CORE |
Core |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_CORE_ID |
Core id |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_DEVICE_CORE |
device core. For single core, it is the device like MK64F12. For multicore, it is device+core like MIMXRT1176_cm4 or MIMXRT1176_cm7 |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_FPU |
fpu |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_FPU_TYPE |
fpu type. |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_DEVICE_ID |
Device id like MK64FN1M0xxx12 |
Kconfig process |
CMake |
|
CONFIG_MCUX_HW_DEVICE_PART |
Device part like MK64FN1M0VDC12 |
Kconfig process |
CMake |
|
CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX |
NPI provided device default linker file name prefix, like “LINKER devices/${soc_portfolio}/${soc_series}/${device}/gcc/${CONFIG_MCUX_TOOLCHAIN_LINKER_DEVICE_PREFIX}_flash.ld”, for MK64F12, it is devices/Kinetis/MK64F12/gcc/MK64FN1M0xxx12_flash.ld |
Kconfig process |
CMake |
|
CONFIG_MCUX_TOOLCHAIN_IAR_CPU_IDENTIFIER |
IAR IDE project device identifier |
Kconfig process |
CMake |
|
CONFIG_MCUX_TOOLCHAIN_MDK_CPU_IDENTIFIER |
MDK IDE project device identifier |
Kconfig process |
CMake |
Basically, all type string Kconfig symbol can be regarded as variable and used in CMake.
Except for the above variables, there are variables which are generated in the configuration stage:
Variable Name |
Explanation |
|---|---|
MCUX_SDK_PROJECT_NAME |
The processed example name, it equals |
APPLICATION_SOURCE_DIR |
Project CMakelists.txt directory like examples/demo_apps/hello_world |
APPLICATION_BINARY_DIR |
Output build directory like |
Customized Variables
Besides the above variables, you can set your own variable in CMake to facilitate your data record with extension mcux_set_variable.
For the required variables, BCS will guarantee that they are defined before they are used.
For you customized variables, please make sure that your variables are defined before they are used by yourself.
Tips For Variable Usage
Variable value replacement is invisible in CMake process, to avoid potential issues, please minimize the usage of variable.
To make Kconfig integratable for other Kconfig system, please don’t use variables in Kconfig data other than “rsource”. “rsource” is only to load Kconfig files.
Repo Data
MCUXpresso SDK repo CMake and Kconfig data are composed of arch, boards, devices, drivers, components, middlewares and examples. Based on the decoupling principle, all these different kinds data are placed under different folders of the MCUXpresso SDK repo.
Arch Data
MCUXpresso SDK support all mainstream soc architecture like ARM, Riscv, DSC. The soc architecture specific data are recorded in <mcu-sdk-3.0>/arch/<arch> folder.
Here is the hierarchy of arch data folder:
arch:
arm:
target: Commonly shared build targets data like debug and release
configuration: Commonly shared build configuration data
cortexm: Core settings
CMSIS: CMSIS headers
dsp56800:
xtensa:
Board Data
Structure
Board data stays in boards folder. Here is a hierarchy demonstrated with single core device board frdmk64f and multicore device board evkmimxrt1170:
_boards:
frdmk64f: # A single core device board
CMakeLists.txt: Board specific contents like components and settings
Kconfig: Board software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.defconfig: Board specific components selection and configuration for invisible Kconfig symbols
prj.conf: Board specific components selection and configuration
example.yml: The supported toolchains and build configuration targets
variable.cmake: Board variables
board_runner.cmake: Board debug settings
shields: The shields, see next Shield Data chapter
demo_apps:
hello_world:
reconfig.cmake: Board example reconfig, mainly replace, remove some default board settings
prj.conf: Board example specific component selection and configuration
reconfig.cmake: Board example category reconfig, mainly replace, remove some default settings
prj.conf: Board example category specific component selection and configuration
rtos_examples: # like above demo_apps
freertos_hello:
reconfig.cmake:
prj.conf:
reconfig.cmake:
prj.conf:
evkmimxrt1170: # A multicore device board
cm4: Core specific contents folder
example.yml: Board core specific example list
Kconfig: Board core software Kconfig, mainly specify board core specific component and project segment dependency
Kconfig.defconfig: Board core specific components selection and configuration for invisible Kconfig symbols
prj.conf: Board core specific components selection and configuration
setting.cmake: Board core specific data and settings
variable.cmake: Board core specific variables
cm7: # Just like above cm4 core
example.yml:
Kconfig:
Kconfig.defconfig:
prj.conf:
setting.cmake:
variable.cmake:
CMakeLists.txt: Board specific contents like components and settings
Kconfig: Board software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.defconfig: Board specific components selection and configuration for invisible Kconfig symbols
prj.conf: Board specific components selection and configuration
variable.cmake: Board variables
board_runner.cmake: Board debug settings
demo_apps:
reconfig.cmake: Board example category reconfig, mainly replace, remove some default board settings
hello_world:
cm4:
reconfig.cmake: Board core specific example reconfig, mainly replace, remove some default board settings
prj.conf: Board core example specific components selection and configuration
cm7:
reconfig.cmake:
prj.conf:
reconfig.cmake: Board example category reconfig, mainly replace, remove some default board settings
prj.conf: Board example category specific component selection and configuration
prj.conf: components selection and configuration by all boards
Example.yml
The board level supported toolchains and build configuration targets shall be recorded in the example.yml.
A typical board example.yml is like
board.toolchains:
- +armgcc@debug
- +armgcc@release
- +iar@debug
- +iar@release
- +mdk@debug
- +mdk@release
All examples under the board share the toolchains and targets in the board example.yml.
Shield Data
Shield is an addon which is attached to a board to extend its features and functionalities. All shields are put under its mother board folder. The structure is like
_boards:
frdmk64f:
shields:
a8974:
<example category>:
CMakeLists.txt:
Kconfig:
prj.conf:
<other_shield>:
<example category>:
CMakeLists.txt:
Kconfig:
prj.conf:
The shield shares the board example.yml for toolchains and targets support. The shield CMakelists.txt shall be added into the board CMakeLists.txt with mcux_add_cmakelists and the shield Kconfig shall be ‘rsource’ in the board Kconfig.
Device Data
Device data stays in devices folder. Here is the device data hierarchy demonstrated with single core device MK64F 2 and multicore device MIMXRT1176:
devices:
Kinetis: Device socs sery
MK63F12:
Kconfig: Device software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.chip: Device hardware Kconfig related to device and core
Kconfig.defconfig: Device specific components selection and configuration for invisible Kconfig symbols
CMakeLists.txt: Device specific contents like components and settings, usually, just load mainset cmakelist
driver:
CMakeLists.txt: Device specific drivers
Kconfig: Device specific drivers Kconfig
prj.conf: Device specific components selection and configuration for visible Kconfig symbols
MK64F12:
Kconfig: Device software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.chip: Device hardware Kconfig related to device and core
Kconfig.defconfig: Device specific components selection and configuration for invisible Kconfig symbols
CMakeLists.txt: Device specific contents like components and settings
driver:
CMakeLists.txt: Device specific drivers
Kconfig: Device specific drivers Kconfig
prj.conf: Device specific components selection and configuration
prj.conf: Components selection and configuration by all Kinetis series
RT:
MIMXRT1175:
cm4:
driver:
CMakeLists.txt: Device core specific drivers
Kconfig: Device core software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.chip: Device core hardware Kconfig related to device and core
Kconfig.defconfig: Device core specific components selection and configuration for invisible Kconfig symbols
setting.cmake: Device core specific data and settings
variable.cmake: Device core specific variables
prj.conf: Device core specific components selection and configuration
cm7: # just like core cm4
driver:
CMakeLists.txt:
Kconfig:
Kconfig.chip:
Kconfig.defconfig:
setting.cmake:
variable.cmake:
prj.conf:
CMakeLists.txt: Device specific contents like components and settings, usually, just load mainset cmakelist
driver:
CMakeLists.txt: Device specific drivers
Kconfig: Device
Kconfig.chip: Device software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.defconfig: Device specific components selection and configuration for invisible Kconfig symbols
prj.conf: Device specific components selection and configuration
MIMXRT1176:
cm4:
driver:
CMakeLists.txt: Device core specific drivers
Kconfig: Device core software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.chip: Device core hardware Kconfig related to device and core
Kconfig.defconfig: Device core specific components selection and configuration for invisible Kconfig symbols
setting.cmake: Device core specific data and settings
variable.cmake: Device core specific variables
prj.conf: Device core specific components selection and configuration
cm7: # just like core cm4
driver:
CMakeLists.txt:
Kconfig:
Kconfig.chip:
Kconfig.defconfig:
setting.cmake:
variable.cmake:
prj.conf:
CMakeLists.txt: Device specific contents like components and settings
driver:
CMakeLists.txt: Device specific drivers
Kconfig: Device
Kconfig.chip: Device software Kconfig, mainly specify board specific component and project segment dependency
Kconfig.defconfig: Device specific components selection and configuration for invisible Kconfig symbols
prj.conf: Device specific components selection and configuration
prj.conf: Components selection and configuration by all RT series
prj.conf: Components selection and configuration by all devices
Example Data
Structure
All examples are expected to be placed under examples folder in their category.
examples:
demo_apps:
prj.conf: Component selection and configuration for all examples under demo_apps
hello_world:
Kconfig: hello_world example Kconfig, if there is no project specific configuration data, please don't add it
CMakeLists.txt: hello world example CMakeLists.txt
prj.conf: hello world example component selection and configuration
example.yml: Miscellaneous description data for example including toolchain and build configuration targets support
rtos_examples:
prj.conf: Component selection and configuration for all examples under rtos_examples
freertos_hello:
Kconfig: freertos_hello example Kconfig, if there is no project specific configuration data, please don't add it
CMakeLists.txt: freertos_hello example CMakeLists.txt
prj.conf: freertos hello example component selection and configuration
example.yml: Miscellaneous description data for example including toolchain and build configuration targets support
prj.conf: all examples shared component selection and configuration
Here is a typical case of example.yml:
# yaml-language-server: $schema=../../../../../scripts/data_schema/example_description_schema.json
hello_world:
section-type: application
contents:
meta_path: examples/demo_apps/hello_world
project-root-path: boards/${board}/demo_apps/hello_world/${multicore_foldername}
document:
name: hello_world${core_id_suffix_name}
category: demo_apps
brief: The HelloWorld demo prints the "Hello World" string to the terminal using
the SDK UART drivers and repeat what user input. The purpose of this demo
is to show how to use the UART, and to provide a simple project for debugging
and further development.
boards:
frdmk64f: []
evk9mimx8ulp@cm33: []
evkbimxrt1050:
- +armgcc@flexspi_nor_sdram_debug
- +armgcc@flexspi_nor_sdram_release
- +armgcc@sdram_txt_debug
- +armgcc@sdram_txt_release
- +iar@flexspi_nor_sdram_debug
- +iar@flexspi_nor_sdram_release
- +iar@ram_0x1400_debug
- +iar@ram_0x1400_release
- +iar@sdram_txt_debug
Example Toolchain And Target
The supported toolchains and build configuration targets for an example can be got in the following way:
Get the designated board example.yml to get the default supported toolchains and build configuration targets.
Get the designated board from “boards” data attribute
If the data attribute is empty, then the board level toolchains and build configuration targets are the example ones.
If the data attribute exists, “+” to add extra toolchains and build configuration targets pairs from board ones. “-” to reduce extra ones from board ones.
A detailed json schema is provided for the example level example.yml, please review.
Driver Data
Base SDK drivers are placed under drivers folder.
You can use mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/drivers) to recursively include all drivers CMakelists.txt once.
drivers:
clock:
CMakeLists.txt:
Kconfig:
common:
CMakeLists.txt:
Kconfig:
<other drivers>:
CMakeLists.txt:
Kconfig:
Kconfig: load all driver Kconfig
Component Data
Base SDK components are placed under components folder.
You can use mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/components) to recursively include all components CMakelists.txt once.
components:
serial_manager:
CMakeLists.txt:
Kconfig:
<other components>:
CMakeLists.txt:
Kconfig:
Kconfig: load all components Kconfig
Assembly Point
All the above data are pieces of building blocks. For any build process, all data shall be loaded for selection and configuration. The assembly point is the start entry from where all CMakes and Kconfigs can be loaded.
The assembly point for all cmakes is the root CMakeLists.txt. It looks like
# Load device CMakeLists.txt
mcux_add_cmakelists(${SdkRootDirPath}/devices/${soc_portfolio}/${soc_series}/${device})
# Load board CMakeLists.txt
mcux_add_cmakelists(${SdkRootDirPath}/examples/)
# Load all drivers
mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/drivers)
# all components
mcux_add_cmakelists(${SdkRootDirPath}/components)
# middlewares
mcux_add_cmakelists(${SdkRootDirPath}/rtos/freertos/freertos-kernel OPTIONAL)
mcux_add_cmakelists(${SdkRootDirPath}/middleware/usb OPTIONAL)
mcux_add_cmakelists(${SdkRootDirPath}/middleware/fatfs OPTIONAL)
mcux_add_cmakelists(${SdkRootDirPath}/middleware/littlefs OPTIONAL)
mcux_add_cmakelists(${SdkRootDirPath}/middleware/multicore OPTIONAL)
The assembly point for all Kconfig is the root Kconfg.mcuxpresso which is
# board
rsource "examples/Kconfig"
# device
rsource "devices/Kconfig"
# Driver config
menu "Driver Configuration"
rsource "drivers/Kconfig"
osource "rtos/freertos/freertos-drivers/Kconfig"
endmenu
# Component config
rsource "components/Kconfig"
# middleware config
menu "Middleware"
osource "middleware/wifi_nxp/Kconfig"
osource "middleware/mbedtls/Kconfig"
osource "middleware/usb/Kconfig"
osource "middleware/fatfs/Kconfig"
osource "middleware/littlefs/Kconfig"
osource "middleware/multicore/Kconfig"
......
endmenu
# RTOS config
menu "RTOS"
menu "FreeRTOS"
osource "rtos/freertos/freertos-kernel/Kconfig"
osource "rtos/freertos/backoffalgorithm/Kconfig"
......
endmenu
endmenu
menu "External Modules"
osource "$(KCONFIG_BINARY_DIR)/Kconfig.modules"
endmenu
The CMake include and Kconfig rsource(load) are generally aligned which means they shall stay together corresponding each other.
For other CMake based BS which wants to integrate MCUXpresso SDK, it may needs to set up the new assembly point file for CMake and Kconfig files in this repo.
Kconfig Interface
menuconfig and guiconfig are 2 available interactive configuration interfaces to start a GUI to do run time selection and configuration for Kconfig options.
menuconfig is a curses-based interface that runs in the terminal while guiconfig is a graphical configuration interface.
Since the Kconfig data has variable inside, they need to be processed. BS has integrated this process into the build process. You can use west cmdline to start the GUI.
Run cmake configuration
west build -b frdmk64f examples/demo_apps/hello_world --cmake-only
You can ignore “–cmake-only”, then the projecrt will be built.
Run guiconfig target
west build -t guiconfig
Then you will get the Kconfig GUI launched, like
You can select/deselect and modify to do reconfiguration and remember to save.
After you save and close, you can directly run “west build” to do the build.
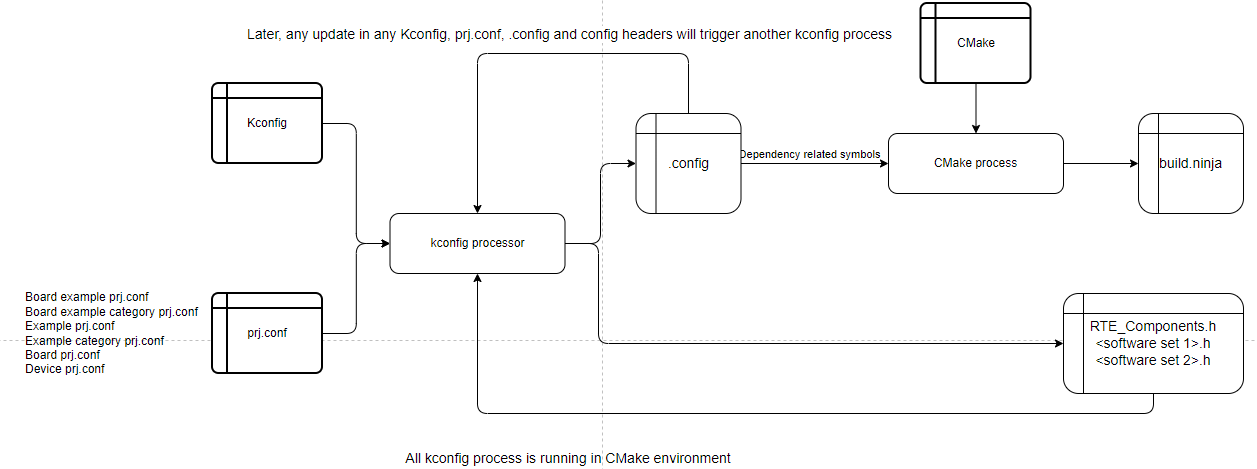
Kconfig Process Flow
The Kconfig files and related prj.conf with priority are put into the Kconfig processor.
The direct output is the .config and config headers. Any updates in input Kconfig, output .config and config header will trigger a Kconfig process in next build cmd
prj.conf
As illustrated previously, prj.conf is the pre set value for Kconfig symbols. It is the input for the Kconfig process. Unlike the CMake which shall be explicitly included, the proj.conf will be loaded implicitly with different priority.
The prj.conf search paths can be provided through 3 ways with priority.
Fixed prj.conf search paths
For all project build, the following path prj.conf will anyway be collected into the build. They are related to device, board and example board specific part. The priority is from low to high. High priority prj.conf data will override low priority prj.conf data.
devices/prj.conf
devices/<soc_series>/prj.conf
devices/<soc_series>/<device>/prj.conf
devices/<soc_series>/<device>/<core_id>/prj.conf
examples/prj.conf
examples/_boards/prj.conf
examples/_boards/<board>/prj.conf
examples/_boards/<board>/<core_id>/prj.conf
examples/<example_category>/prj.conf
examples/<example_category>/<example>/prj.conf
examples/_boards/<board>/<example_category>/prj.conf
examples/_boards/<board>/<example_category>/<example>/prj.conf
examples/_boards/<board>/<example_category>/<example>/<core_id>/prj.conf
For shield case, it is generally the same as board:
devices/prj.conf
devices/<soc_series>/prj.conf
devices/<soc_series>/<device>/prj.conf
devices/<soc_series>/<device>/<core_id>/prj.conf
examples/prj.conf
examples/_boards/prj.conf
examples/_boards/<board>/prj.conf
examples/_boards/<board>/<core_id>/prj.conf
examples/<shield_example_category>/prj.conf
examples/<shield_example_category>/<example>/prj.conf
examples/_boards/<board>/<shield>/prj.conf
examples/_boards/<board>/<shield>/<shield_example_category>/prj.conf
examples/_boards/<board>/<shield>/<shield_example_category>/<example>/prj.conf
examples/_boards/<board>/<shield>/<shield_example_category>/<example>/<core_id>/prj.conf
If the “project” macro is with “NO_DEFAULT_CONFIG” like the following, then build system will skip all the fixed prj.conf search paths, since the input prj.conf cannot be empty, so the prj.conf must be provided with CUSTOM_PRJ_CONF_PATH or DCONF_FILE.
project(hello_world LANGUAGES C CXX ASM NO_DEFAULT_CONFIG)
Specify customized prj.conf search path in project CMakelists.txt “project” with “CUSTOM_PRJ_CONF_PATH”
The “CUSTOM_PRJ_CONF_PATH” argument can be used in project CMakelists.txt “project” macro to specify the customized prj.conf search paths.
Here is an example:
project(hello_world LANGUAGES C CXX ASM PROJECT_BOARD_PORT_PATH examples/_boards/${board}/demo_apps/hello_world CUSTOM_PRJ_CONF_PATH <customized path 1> <customized path 2>)
The prj.conf search paths of CUSTOM_PRJ_CONF_PATH is with higher priority than the fixed prj.conf search paths.
-DCONF_FILE=<customized config file>
You can directly provide customized prj.conf with -DCONF_FILE=<customized config file>, like
west build -b evkmimxrt1170 examples/demo_apps/hello_world -Dcore_id=cm4 -DCONF_FILE=./examples/prj.conf
The customized project config file has the highest priority over all.
.config
.config will be filtered to get the component and project segment dependency symbol values, such symbol values will be put into cmake process so that cmake knows which component and project segment data shall be included into the build process.
For example, if CONFIG_MCUX_COMPONENT_driver.uart is y in .config, then the following sources and includes will be added into the build during cmake process, otherwise not.
if (CONFIG_MCUX_COMPONENT_driver.uart)
mcux_add_source(
SOURCES fsl_uart.h
fsl_uart.c
)
mcux_add_include(
INCLUDES .
)
endif()
config headers
The Kconfig symbols and the values will be generated into config headers placed in build binary folder.
If you want your components Kconfig symbols and values to be generated into customized header, you can set Kconfig menu with (header name). Here is an example with Freertos kernel.
menu "freertos-kernel(FreeRTOSConfig.h)" # All freertos kernel Kconfig symbols and values will be generated into FreeRTOSConfig.h
config MCUX_COMPONENT_middleware.freertos-kernel
bool "middleware.freertos-kernel"
select MCUX_COMPONENT_middleware.freertos-kernel.extension
config MCUX_COMPONENT_middleware.freertos-kernel.extension
......
endmenu
If it is not set, then all Kconfig symbols and values will be generated header named mcux_config.h.
There are 2 ways to include the generated config headers into build tree.
The config headers shall be included in the source in advance and the build binary folder will be added into includes so that all config headers will be added into build tree. This is the default way.
If run with “-DPREINCLUDE=1”, then all generated header files will be included into build tree in a preinclude way.
Component Configuration In Project Construction
There are following ways to do component configuration in the project construction and build
Use the provided default configuration header of the component set
Use Kconfig to do RTE configuration for the component set
Prepare customized configuration header for the component set.
To achieve the above way, a component set(especially middleware components) shall do the following steps:
Prepare a “config” component to hold the default configuration file for the component set. The configuration file shall be marked with CONFIG: TRUE and the include shall be with “TARGET_FILES”. The “config” header file has lowest priority in the build system, if any same name header file is provided, then it won’t be included. This “config” component shall be selected by the root component of the component set, then it can always be selected. So if the customized configuration is not provided for that component, the project can still build with default configuration.
Prepare a project segment to hold all Kconfig configuration symbols for the component set. All the configuration symbols shall be set to generated into designated header file with the same name as component default configuration.
If you want to use Kconfig to do RTE configuration, then the project segment shall be set to ‘y’. The generated configuration header name shall be set in Kconfig and be the same with component default configuration head file so that it will override the component default one. The project segment can depend on the root component of the component set so that it can involve root component of the set. If you don’t want to use Kconfig but want to directly provide a configuration header, then project segment should be set to ‘n’, the directly provided configuration header shall be put in the root of project.
Build Process Flow
Broadly speaking, the build process flow can be divide into Kconfig process and CMake process.
When you run a build, BS start from the example CMakelists.txt to work:
cmake_minimum_required(VERSION 3.30.0)
include(${SdkRootDirPath}/cmake/extension/mcux.cmake)
## In this mcux.cmake, BS does the following work
# 1. Load used extension modules like python.cmake, sysbuild.cmake
# 2. Clean cached cmake compiler flags variable
# 3. Load toolchain.cmake
# 4. Load board variable
# 5. Load device variable
# With board and device variable, cmake has the environment to start Kconfig because Kconfig needs board and device variables to work. This execution will be done in following "project"
project(hello_world LANGUAGES C CXX ASM PROJECT_BOARD_PORT_PATH examples/_boards/${board}/demo_apps/hello_world/${multicore_foldername})
## In this "project" macro, BS continuously does the following work
# 6. Add execution cmake target
# 7. Add pristine cmake target
# 8. Execute Kconfig process to get .config and config headers
# 9. Process .config to get
# a. All variables used in CMakes so that all cmakes can be included
# b. component and project segment if-endif guard condition value so that cmake knows whether include or skip the component or project segment
# config headers with compiler macros inside which are in the build tree
# 10. Add run cmake target
# 11. Add GUI generation cmake target
include(${SdkRootDirPath}/CMakeLists.txt)
# ${SdkRootDirPath}/CMakeLists.txt is the assembly point for all board/device, drivers, components, middlewares cmake data.
# Here is its contents
# # Load device CMakeLists.txt
# mcux_add_cmakelists(${SdkRootDirPath}/devices/${soc_portfolio}/${soc_series}/${device})
# Load board CMakeLists.txt
# mcux_add_cmakelists(${SdkRootDirPath}/boards/${board})
# Load all drivers
# mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/drivers)
# all components
# mcux_load_all_cmakelists_in_directory(${SdkRootDirPath}/components)
# CMSIS
# mcux_add_cmakelists(${SdkRootDirPath}/CMSIS)
# middlewares
# mcux_add_cmakelists(${SdkRootDirPath}/rtos/freertos/freertos-kernel OPTIONAL)
# mcux_add_cmakelists(${SdkRootDirPath}/middleware/fatfs OPTIONAL)
# mcux_add_cmakelists(${SdkRootDirPath}/middleware/multicore OPTIONAL)
# After the include(${SdkRootDirPath}/CMakeLists.txt), the project has got the environment setup and all depended data included
# If needed, load other customized cmake
include(${SdkRootDirPath}/examples/demo_apps/reconfig.cmake OPTIONAL)
include(${SdkRootDirPath}/${project_board_port_path}/reconfig.cmake OPTIONAL)
# Add the project self source and include
mcux_add_source(
SOURCES hello_world.c
)
mcux_add_include(
INCLUDES .
)
Example Types
Example types are distinguished based on the location of the example CMakelists.txt:
Example type |
CMakelists.txt Location |
|---|---|
Repository |
mcu-sdk-3.0 repo examples folder |
freestanding |
Other location than mcu-sdk-3.0 repo examples folder, it can be inside or outside mcu-sdk-3.0 repo |
Standalone |
A completely detached project from the repository, contains everything necessary for a single project, which does not rely on meta build system. |
Repository Example
Repository example CMakelists.txt is located inside mcu-sdk-3.0/examples/<example-category>/<example> folder, like the hello_world CMakelists.txt is located in mcu-sdk-3.0/examples/demo_apps/hello_world.
sdk_next/
├─── .west/
│ └─── config
└─── mcu-sdk-3.0/
├── arch/
├── cmake/
├── examples
│ ├─── demo_apps
│ ├── reconfig.cmake
│ ├── prj.conf
│ ├── hello_world
│ ├── CMakeLists.txt
│ ├── Kconfig
│ ├── prj.conf
│ ├── hello_world.c
The repository example supports “PROJECT_BOARD_PORT_PATH” inside “project” macro to specify the unified and customized board specific configuration. Any prj.conf and reconfig.cmake inside any sub folder of PROJECT_BOARD_PORT_PATH will be included into build tree.
Freestanding Example
Freestanding example CMakelists.txt shall be located in any place other than mcu-sdk-3.0/examples.
Freestanding examples doesn’t support “PROJECT_BOARD_PORT_PATH” in “project” macro.
Freestanding examples share the same build and run way as repository examples. You can still use west build to work.
Inside mcu-sdk-3.0 repo
sdk_next/ ├─── .west/ │ └─── config └─── mcu-sdk-3.0/ ├── arch/ ├── cmake/ ├── <any folder>/ │ ├── hello_world │ ├── CMakeLists.txt │ ├── Kconfig │ ├── prj.conf │ ├── hello_world.c
Outside mcu-sdk-3.0 repo
<home>/ ├─── sdk_next/ │ ├─── .west/ │ │ └─── config │ ├── mcu-sdk-3.0/ │ └── ... │ └─── app/ ├── CMakeLists.txt ├── prj.conf └── src/ └── main.c
All freestanding examples still share the default prj conf of the target board and device. Compared with repository example, the board example specific configuration inside examples folder are not available for freestanding examples.
The prj conf list is like
1. devices/prj.conf
2. devices/<soc_series>/prj.conf
3. devices/<soc_series>/<device>/prj.conf
4. devices/<soc_series>/<device>/<core_id>/prj.conf
5. examples/prj.conf
6. examples/_boards/prj.conf
6. examples/_boards/<board>/prj.conf
7. examples/_boards/<board>/<core_id>/prj.conf
8. <example location>/prj.conf
Note, the freestanding project may don’t need the default pin mux and hardware_init/app prj.conf setting, you can disable them by
CONFIG_MCUX_PRJSEG_module.board.pinmux_project_folder=n
CONFIG_MCUX_PRJSEG_module.board.pinmux_board_folder=n
CONFIG_MCUX_HAS_PRJSEG_project.use_hw_app=n
CONFIG_MCUX_HAS_PRJSEG_module.board.pinmux_sel=n
Standalone Example
If you want to share the example with others, sharing the freestanding project is a good way if both sides work on mcu-sdk-3.0. However, if the other developer does not use meta build system, it is not feasible to zip all repository into a package file and send it over email.
Based on this requirement, the meta build system can export standalone project from the repository. The project contains everything necessary for a single project, keeps same folder structure comparing with repository, which does not rely on meta build system.
To accomplish this, we maintain a simplified build system in a separate project. In short, for those IDEs with a graphical interface, generate the corresponding IDE project, for example, .ewp file for IAR, .uvprojx for Keil. As for toolchain without GUI project, such as ARMGCC, provide a CMakeLists.txt that flattens all files and configurations.
The standalone project can be generated with west command line parameters “-t standalone_project”. For example:
west build -b frdmk64f ./examples/demo_apps/hello_world -p always --config debug --toolchain iar -t standalone_project
You can find IAR project in build folder with source code.
Note:
The default destination folder is mcu-sdk-3.0/build/${toolchain}. You can also specify the destination folder with command line parameter “-d” .
You can only create a project for a specific toolchain and config in one CMake configuration context. You should remove CMake build folder or run with “-p always” if changing toolchain or config
If the CMake has generated build artifacts, you can just type “west build -t standalone_project”
Enable An Example
Please firstly make sure that the target board and device data are ready, then follow the example CMakelists.txt pattern in Project chapter and make your own one.
If the default board and device data and configuration cannot satisfy, then you need to do customization for the certain board or device or both.
BCS provides following ways to do the customization.
Reconfig CMake
For example, the hello_world example CMakelists.txt is defined in “examples/demo_apps/hello_world”. Inside it, there are 2 optional included reconfig.cmake, like
include(${SdkRootDirPath}/examples/demo_apps/reconfig.cmake OPTIONAL) # project_board_port_path here means boards/frdmk64f/demo_apps/hello_world include(${SdkRootDirPath}/${project_board_port_path}/reconfig.cmake OPTIONAL)
You can add reconfig.cmake in any sub folder of the above 2 optional cmake path to different level reconfig.cmake and remember to include it recursively in deeper level cmake.
For example, if you add a boards/frdmk64f/demo_apps/reconfig.cmake, then you should be awared of that this reconfig.cmake shall apply for all demo_apps in frdmk64f.
In these reconfig.cmake, remove extensions can be used to remove board/device common data and settings. After removing the previous data and settings, customization data and settings can be added.
prj.conf
For component selection and configuration, you can use different level prj.conf to achieve it. Refer the priority level in prj.conf to set the data.
Remember to register the example in example.yml so that build system. The example.yml
CI and IDE will know that the examples are enabled in certain boards.
Here is one example:
# in examples/_boards/frdmk64f/example.yml
hello_world:
required: true
Enable West Flash and Debug
Like Zephyr, BS supports setting up configuration for flash runners (invoked from west flash) which allows for customising how commands are used when programming boards.
board_runner.cmake
mcux.cmake will always include this file under ${SdkRootDirPath}/boards/<board> to get runner arguments and which runners are supported for this board. Here is an example:
board_runner_args(pyocd "--target=mimxrt1170_${core_id}")
if(${core_id} STREQUAL cm7)
board_runner_args(jlink "--device=${CONFIG_MCUX_HW_DEVICE_ID}_M7" "--reset-after-load")
elseif(${core_id} STREQUAL cm4)
board_runner_args(jlink "--device=${CONFIG_MCUX_HW_DEVICE_ID}_M4")
endif()
board_runner_args(linkserver "--device=${CONFIG_MCUX_HW_DEVICE_ID}:MIMXRT1170-EVK")
board_runner_args(linkserver "--core=${core_id}")
include(${SdkRootDirPath}/cmake/extension/runner/jlink.board.cmake)
include(${SdkRootDirPath}/cmake/extension/runner/pyocd.board.cmake)
include(${SdkRootDirPath}/cmake/extension/runner/linkserver.board.cmake)
board_runner_args is used to pass runner speicfic arguments and then you have to include the board supported runner cmake file from ${SdkRootDirPath}/cmake/extension/runner/.
The first included runner cmake will be set as the default runner for both flash and debug. If you want to set another default runner. Please set following variable in board’s variable.cmake:
mcux_set_variable(BOARD_FLASH_RUNNER "linkserver")
mcux_set_variable(BOARD_DEBUG_RUNNER "jlink")
To let the runners get correct flash address, developer should maintain Kconfig variable FLASH_BASE_ADDRESS. It usually be overrided in devices/${soc_portfolio}/${soc_series}/${device}/(${core_id})/prj.conf:
CONFIG_FLASH_BASE_ADDRESS=0x30000400
McuxSDK CMake Package
MCUXpresso SDK repo contents can be used as a standard McuxSDK CMake package . The McuxSDK CMake package is a convenient way to create a SDK next repo based freestanding example. It ensures that CMake can automatically find the MCUXpresso SDK repo and use the contents to build the example.
There are 2 ways to use the McuxSDK CMake package:
Export the MCUXpresso SDK repo to system standard CMake User Package Registry and directly use
find_package(McuxSDK).Here is the table about the standard CMake user package registry in different OSes.
OS
CMake user package registry
Windows
HKEY_CURRENT_USER\Software\Kitware\CMake\Packages\Zephyr
Ubuntu
~/.cmake/packages/Zephyr
MacOS
~/.cmake/packages/Zephyr
There are 2 ways to export MCUXpresso SDK repo.
You can use west cmd
west mcuxsdk-exportto export.You can directly use cmake cmd
cmake -P <sdk repo root>/share/mcuxsdk-package/cmake/mcuxsdk_export.cmaketo export.
Directly add the MCUXpresso SDK repo root as
HINTforfind_package(McuxSDK HINT <repo root>)
Create Example With “find_package(McuxSDK)”
When using McuxSDK CMake package, you just simply needs to write find_package(McuxSDK) in the beginning of the application CMakeLists.txt file, then build system will get all needed drivers, components and middlewares for designated devices and boards and build them into a static library called McuxSDK. This McuxSDK has been linked to target “app” in advance, you only need to add the example specific sources/include/configuration.
Here is an example:
cmake_minimum_required(VERSION 3.30.0)
find_package(Mcuxsdk REQUIRED)
project(hello_world LANGUAGES C CXX ASM)
mcux_add_source(
SOURCES
hello_world.c
pin_mux.c
pin_mux.h
hardware_init.c
app.h
)
mcux_add_include(
INCLUDES
.
)
If you use native cmake target_ function with target “app”, then the sources/includes/configurations are added for target app. If you use NXP cmake extension to add sources/includes/configurations, then the data and files are added into target McuxSDK, a static library.
If there is no special instruction, the app target will use default provided linker by MCUXpresso SDK if it is an executable. If you want to use your own linker, then please add “CUSTOM_LINKER TRUE” in the “project” like
project(hello_world LANGUAGES C CXX ASM CUSTOM_LINKER TRUE)
then add your own linker.
McuxSDK CMake Package Version
find_package(McuxSDK) supports to specify MCUXpresso SDK version number in x.y.z format which is very useful as it ensures the example is built with a minimal MCUXpresso SDK version. An explicit version also helps CMake to select the correct MCUXpresso SDK to use for building when there are multiple MCUXpresso SDK repos in the system.
Here is an example with version:
find_package(McuxSDK 3.0.0)
project(hello_world)
This requires hello_world project to be built with MCUXpresso SDK version 3.0.0 as minimum.
find_package supports the keyword EXACT to ensure an exact version is used.
find_package(McuxSDK 3.0.0 EXACT)
project(hello_world)
IDE Generation
CMake is a text-oriented tool that uses the command-line, for many developers, especially those who are used to working on Windows operating system, this is not a great experience for coding and debugging. Therefore the meta build system supports GUI project generation for specific IDE.
Prerequisite
Currently, we have not implemented all features through Python. So, in order to generate IDE GUI projects, you have to prepare the ruby 3.1 environment, You can refer SDK Generator V3 environment setup.
In short words:
For windows: use portable_ruby. You can run
west install_rubydirectly if the portable_ruby is in mcu-sdk-3.0/ecosystem/sdk_generator/bin/windows directory.For Linux/MacOS: use rbenv to install
ruby 3.1.2and then download Gemfile and Gemfile.lock in an empty directory and then rungem install bundle && bundle installin it.
Command
It’s quiet easy for you to generate a GUI project definition files, only “–toolchain [iar|mdk] -t guiproject” is required for west command. It tells CMake to run guiproject target to generate project files for specific toolchain.
If you are running a pristine build, please specify board/examples/toolchain/core_id on the command line. For example:
west build -b evkmimxrt1170 examples/demo_apps/hello_world --toolchain iar -Dcore_id=cm7 --config flexspi_nor_debug -p always -t guiproject
If you have run this command, there is a simpler and faster command:
west build -t guiproject
After the command runs, the project files are generated into the compilation directory. You can find it in command line, for example:
[!NOTE]
Currently only IAR and MDK are supported, but we will support other toolchains in the future.
Currently the generation script is ported from SDK Generator which use Ruby language. During the official release phase we will change to python to reduce the effort of configuring development environment.
System Build
Sysbuild is a higher-level build system that can be used to combine multiple other build systems together. It’s ported from Sysbuild (System build) — Zephyr Project. For meta build system, it’s mainly used for multi-image build.
Sysbuild files
To include sub projects into building system, you must prepare sysbuild.cmake into main application folder. Sub projects can be located anywhere, which are imported by ExternalMCUXProject_Add command inside sysbuild.cmake. For example:
# examples/multicore_examples/hello_world/primary/sysbuild.cmake
ExternalMCUXProject_Add(
APPLICATION hello_world_secondary_core
SOURCE_DIR ${APP_DIR}/../secondary
board ${SB_CONFIG_secondary_board}
core_id ${SB_CONFIG_secondary_core_id}
config ${SB_CONFIG_secondary_config}
toolchain ${SB_CONFIG_secondary_toolchain}
)
# Let's build the secondary application first
add_dependencies(${DEFAULT_IMAGE} hello_world_secondary_core)
The build order can by set by add_dependencies function in sysbuild.cmake.
The variables in sysbuild.cmake can be defined inside the file. Or you can pass them with west command.
In practice, however, it is more common to set these variables automatically via kconfig to support multiple platforms in a more flexible way. For example, you can prepare a Kconfig.sysbuild in main application folder:
# examples/middleware/multicore/multicore_examples/hello_world/primary/Kconfig.sysbuild
config secondary_board
string
default "$(board)"
config secondary_core_id
string
default "cm4" if $(board) = "evkmimxrt1170" && $(core_id) = "cm7"
default "cm33_core1" if $(board) = "lpcxpresso55s69" && $(core_id) = "cm33_core0"
config secondary_config
string
default "debug" if $(config) = "debug"
default "debug" if $(config) = "flexspi_nor_debug"
config secondary_toolchain
string
default "$(toolchain)"
One thing to emphasize is that, sysbuild is only used to organize how individual images are compiled, but in reality, how images are included is set by the project’s own cmakelsist.txt. For example, you must import the secondary core binary in primary core image CMakeLists.txt:
# examples/multicore_examples/hello_world/secondary/CMakeLists.txt
mcux_convert_binary(
TOOLCHAINS armgcc mdk iar
BINARY ${APPLICATION_BINARY_DIR}/${CONFIG_TOOLCHAIN}/core1_image.bin
)
# examples/multicore_examples/hello_world/primary/CMakeLists.txt
mcux_add_iar_configuration(
LD "--image_input=${APPLICATION_BINARY_DIR}/../hello_world_secondary_core/iar/core1_image.bin,_core1_image,__core1_image,4 "
)
Build command
To enable sysbuild, only --sysbuild is needed when you run the main application
west build -b evkmimxrt1170 --sysbuild ./examples/multicore_examples/hello_world/primary -Dcore_id=cm7 --config flexspi_nor_debug --toolchain=armgcc -p always
You can find build information from terminal:
Kconfig Target
The sysbuild projects can be configured with kconfig, just like a normal project in the meta build system. The only different is the target name, for main application, they’re menuconfig or guiconfig, for sub project, you must add project name prefix to differ each target. For example:
west build -t guiconfig
west build -t hello_world_secondary_core_guiconfig
Integrated Into Other Build System
Please refer McuxSDK CMake Package.
Note: Currently GUI project and standalone project generation are not supported for other build system which uses McuxSDK CMake Package.
Integrate Other CMake build system
The meta build system is based on CMake, theoretically, it supports the integration of other third-party software based on the CMake compilation system.
There are two ways for this requirement:
If the third-party software will be built as a library and linked to the project from meta build system, you can add the software path to CMake variable “EXTRA_MCUX_MODULES”. The The directory of the path will be regarded as module’s name. You need to create a folder named
mcuxin this path, and prepare files below:module.yml
module.yml must be put into
mcuxfolder. It records the relative path of CMakeLists.txt and Kconfig file. Note that the base path is the path form EXTRA_MCUX_MODULES. For example:name: zcbor #optional, must be set only if module folder name is different with module name build: # if the base path is ~/zcbor cmake: mcux/. #full path ~/zcobr/mcux/CMakeLists.txt kconfig: mcux/Kconfig #full path ~/zcobr/mcux/Kconfig depends: # optional, dependent module will be included into the build system and be processed before current module. - <module>
Kconfig
At least one Kconfig item
MCUX_COMPONENT_${module_name} should be recorded to help enable/disable the third-party software from building. For example:config MCUX_COMPONENT_ZCBOR bool "zcbor CBOR library" help zcbor CBOR encoder/decoder library if MCUX_COMPONENT_ZCBOR config ZCBOR_CANONICAL bool "Produce canonical CBOR" help Enabling this will prevent zcbor from creating lists and maps with indefinite-length arrays (it will still decode them properly). endif # MCUX_COMPONENT_ZCBOR
CMakeLists.txt
All content should be wrapped by
if(CONFIG_MCUX_COMPONENT_${module_name}) ... endif(). Then we can enable/disable the third-party software according to kconfig setting. There is no strict format for CMakeLists.txt. The module project will be linked to application code automatically by build system if it is a static library.For example:
cmake_minimum_required(VERSION 3.20.0) if(CONFIG_MCUX_COMPONENT_ZCBOR) add_library(zcbor) # declare a zcbor library target_sources(zcbor PRIVATE # add files to zcbor library ${MCUX_ZCBOR_MODULE_DIR}/src/zcbor_common.c ${MCUX_ZCBOR_MODULE_DIR}/src/zcbor_decode.c ${MCUX_ZCBOR_MODULE_DIR}/src/zcbor_encode.c ) target_include_directories(zcbor PUBLIC # add include path to zcbor library ${MCUX_ZCBOR_MODULE_DIR}/include ) target_compile_definitions(zcbor PUBLIC _POSIX_C_SOURCE=200809L) # add macro to zcbor library and the targets which links this library if(CONFIG_ZCBOR_CANONICAL) target_compile_definitions(zcbor PRIVATE ZCBOR_CANONICAL) # # add macro only for zcbor library endif () endif()
The software will use assembler/compiler/linker flags provided by meta build system, you can also set specific options for the third-party software in
PRIVATEscope.Note: Due to the loading order of CMake, the compilation settings in reconfig.cmake are not available, so if necessary, you need to set them yourself in cmakelists.txt of the module.
If the other software is a standalone project which has separated configuration, it can be imported by sysbuild.
For example, you can provide a sysbuild.cmake:
ExternalMCUXProject_Add( APPLICATION my_library SOURCE_DIR path/to/my_library CMAKE_ARGS -DCMAKE_BUILD_TYPE=debug -DCMAKE_TOOLCHAIN_FILE=path/to/toolchain.cmake ) # Let's build the secondary application first add_dependencies(${DEFAULT_IMAGE} my_library)
IDE Setting
Assembler/Compiler/Linker Flags
The meta build system use CMake to create build artifacts. In general, CMake doesn’t provide abstraction of flags setting for all kinds of toolchains. So that developer should use the flags for assembler/compiler/linker which follows the rule by each toolchain. Here are links for you to refer:
[IAR][https://wwwfiles.iar.com/AVR/webic/doc/EWAVR_CompilerGuide.pdf]
[MDK][https://developer.arm.com/documentation/100748/0622/Using-Common-Compiler-Options]
[ARMGCC][https://gcc.gnu.org/onlinedocs/]
Assembler/Compiler/Linker flags are set with following CMake configuration function in CMake file, please refer to Configuration
For example, the following code set optimization level for IAR compiler:
mcux_add_iar_configuration(
TARGETS flexspi_nor_debug
CC "-Ol"
)
In the following sections, the commonly used settings are described.
Optimizations flags
IAR
IAR supported compiler optimization flags are:
-On
-Ol
-Om
-Oh
-Ohs
-Ohz
Besides, IAR provides special optimization features:
–no_size_constraints
–no_cse
–no_unroll
–no_inline
–no_code_motion
–no_tbaa
–no_clustering
–no_scheduling
These settings are set up in the IAR GUI as shown here
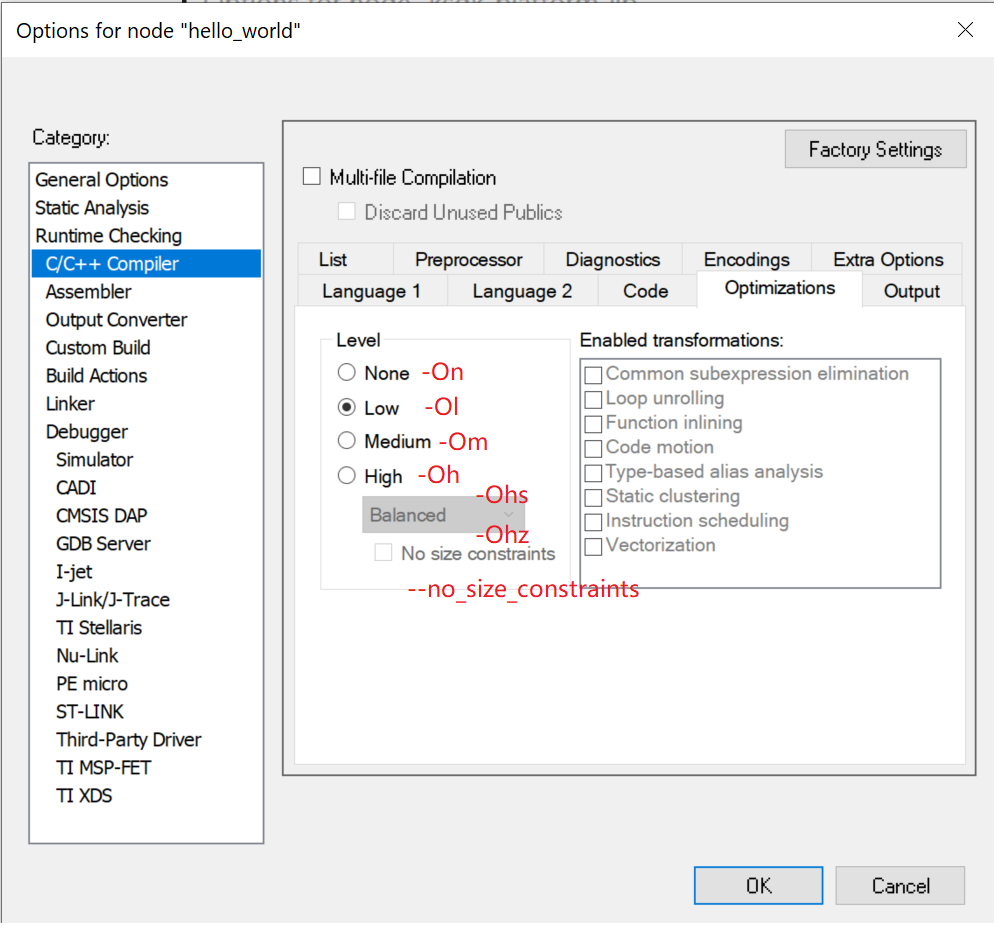
MDK
For ARM compiler v6, optimization flags are -O0/-O1/-O2/-O3/-Ofast/-Os/-Oz.
These flags match with IDE settings as below:
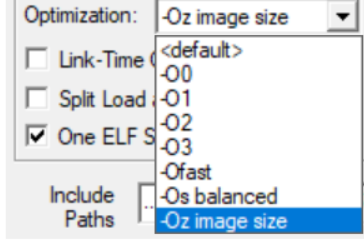
ARMGCC
For ARMGCC, optimization flag are -O0/-O1/-O2/-O3/-Os/-Ofast/-Og.
Macro definition
Macro is used to preprocess source files, it is a common setting for assembler/compiler. You can use CMake configuration function defined in Configuration to set macro definition.
The macro definition follow the pattern “-Dname=value”, or “-Dname” if no value provided.
For example:
mcux_add_iar_configuration(
TARGETS flexspi_nor_debug
AS "-DDEBUG"
CC "-DDEBUG -DXIP_EXTERNAL_FLASH=1 -DFSL_SDK_DRIVER_QUICK_ACCESS_ENABLE=1"
CX "-DDEBUG"
)
Heap Stack setting
Heap and stack is setting by linker script. Generally SDK use macro __stack_size__and __heap_size__ to set the size.
It’s not identical for different toolchain:
IAR
IAR use linker flags
--config_def=__stack_size__=${stack size}and--config_def=__heap_size__=${heap size}For example
mcux_add_iar_configuration( LD "--config_def=__stack_size__=0x3000 --config_def=__heap_size__=0x3000" )
MDK
MDK use linker flags
--predefine="-D__stack_size__=${stack size}"and--predefine="-D__heap_size__=${heap size}"For example
mcux_add_mdk_configuration( LD "--predefine=\"-D__stack_size__=0x3000\" --predefine=\"-D__heap_size__=0x3000\"" )
ARMGCC
ARMGCC use linker flags
-Xlinker --defsym=__stack_size__=${stack size}and-Xlinker --defsym=__heap_size__=${heap size}For example
mcux_add_armgcc_configuration( LD "-Xlinker --defsym=__stack_size__=0x3000 -Xlinker --defsym=__heap_size__=0x3000" )
TrustZone
TrustZone feature is enabled by compiler flags. It may be different for each toolchain.
IAR
mcux_add_iar_configuration(CC "--cmse")
Keil MDK
mcux_add_mdk_configuration(CC "-mcmse")
ARMGCC
mcux_add_armgcc_configuration(CC "-mcmse")
Keil MDK Specific Settings
Change C library
Keil use linker flag --library_type=lib to select the library to be used at link time.
If you don’t specify library, then the linker assumes --library_type=standardlib
If you want to use C micro-library (microlib), please set it as:
mcux_add_mdk_configuration(LD "--library_type=microlib")
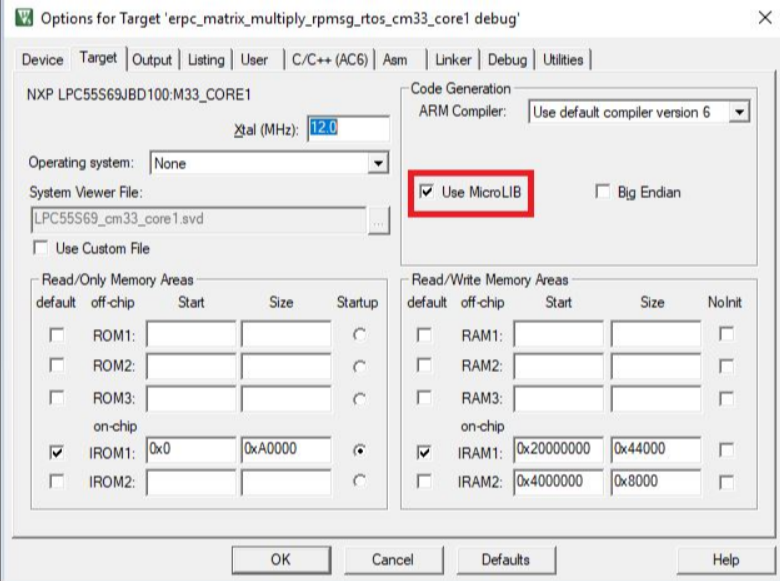
IAR Specific Settings
Change entry symbol
If you need to set the entry symbol for IAR, you can set linker flags in CMake:
mcux_add_iar_configuration(LD "--entry Reset_Handler")
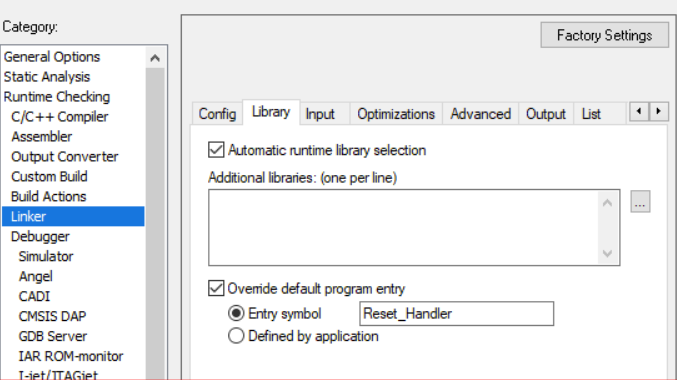
Change C library
C/C++ runtime library configuration can be set with compiler flags, supported library types are:
–dlib_config none
–dlib_config normal
–dlib_config full
–dlib_config custom
For example:
mcux_add_iar_configuration(CC "--dlib_config full")
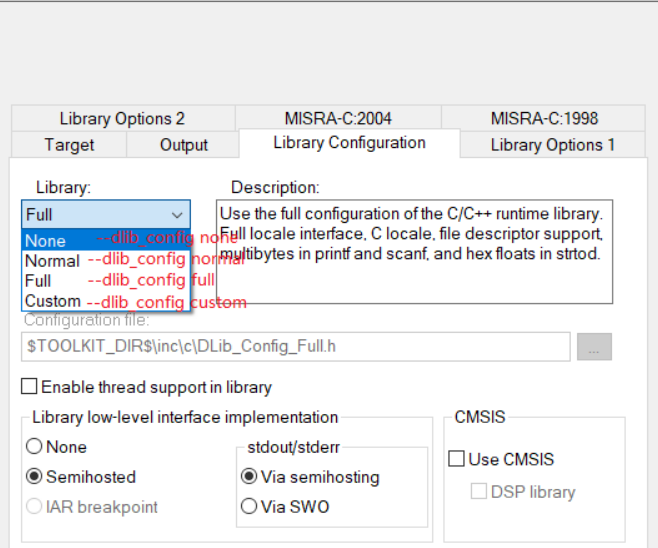
#####Semihosted option
If you need to set semihosted option in IAR, a linker flag --semihosting can be set in CMake.
Further more, the default low-level interface is via semihosting, if using implementation with SWO,
an additional linker flag --redirect __iar_sh_stdout=__iar_sh_stdout_swo is needed.
Here is an example:
mcux_add_iar_configuration(LD "--semihosting --redirect __iar_sh_stdout=__iar_sh_stdout_swo")
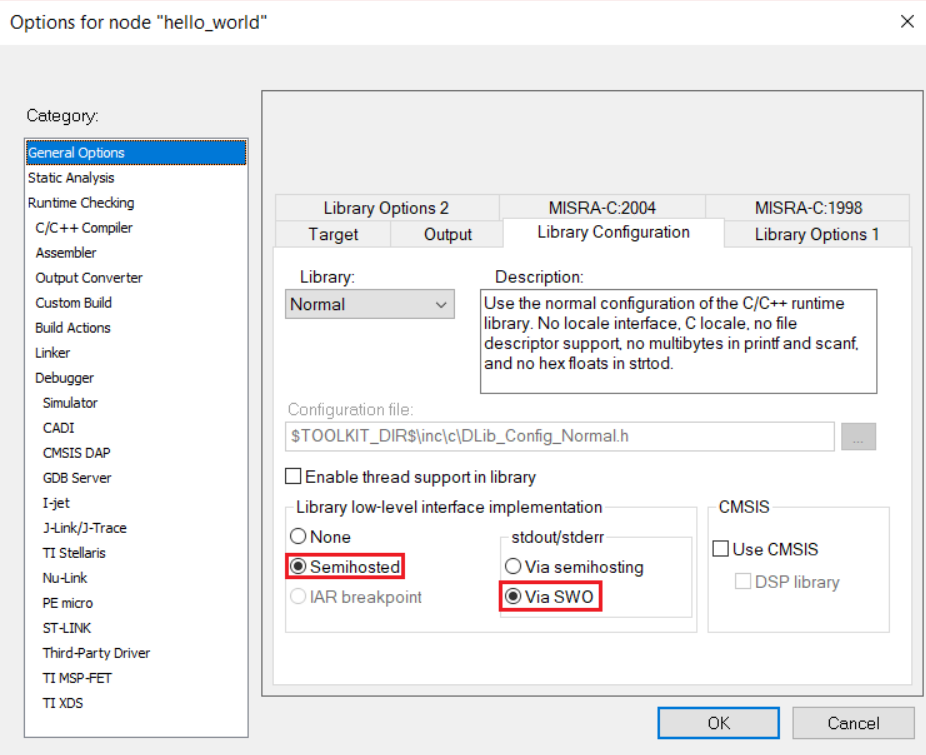
Change I/O option
In IAR Library Options 1 tab, IDE provide configuration for printf formatter and scanf formatter.
For each printf formatting level, you can set ld-flags to configure it. Here are linker flags:
--redirect _Printf=_PrintfFull--redirect _Printf=_PrintfFullNoMb--redirect _Printf=_PrintfLarge--redirect _Printf=_PrintfLargeNoMb--redirect _Printf=_PrintfSmall--redirect _Printf=_PrintfSmallNoMb--redirect _Printf=_PrintfTiny
For each scanf formatting level, you can set ld-flags to configure it. Here are linker flags:
--redirect _Scanf=_ScanfFull--redirect _Scanf=_ScanfFullNoMb--redirect _Scanf=_ScanfLarge--redirect _Scanf=_ScanfLargeNoMb--redirect _Scanf=_ScanfSmall--redirect _Scanf=_ScanfSmallNoMb
Further more, you can enable buffered terminal output with ld-flags --redirect __write=__write_buffered.
Here is an example:
mcux_add_iar_configuration(
CC "--dlib_config full"
LD "--redirect _Printf=_PrintfFull --redirect _Scanf=_ScanfFull --redirect __write=__write_buffered"
)
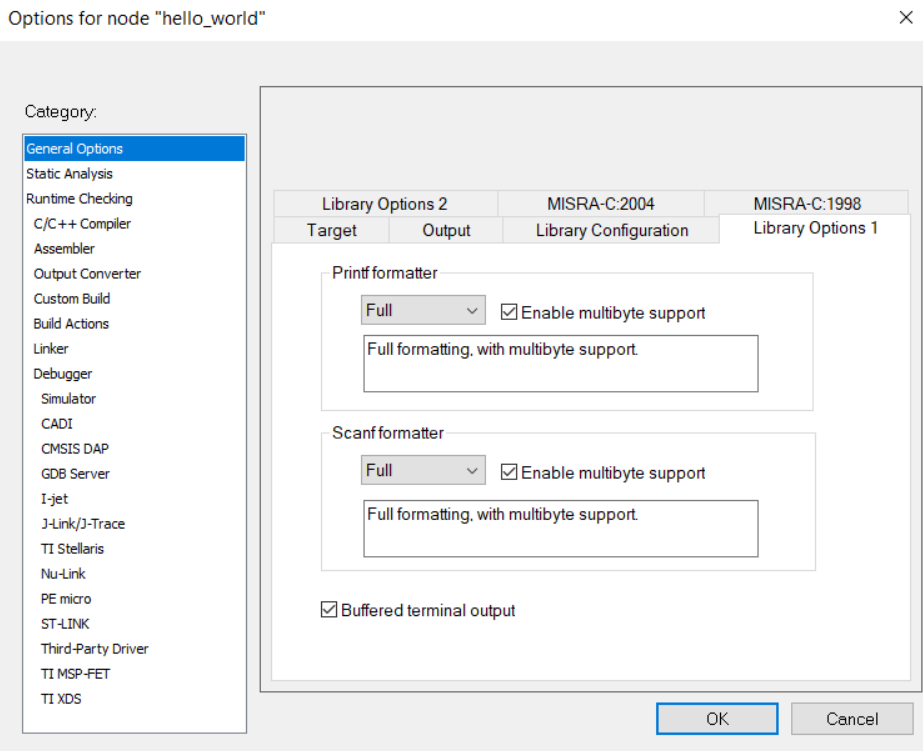
Source And Include Path
The source and include path setting are set in CMake file, please refer to Source And Include
Pre-include File
Linker file
The Linker file setting are set in CMake file, please refer to CMake Extension Linker Setting
Link libraries
The libraries are set in CMake file with CMake extension function mcux_add_configuration, please refer to CMake Extension Configuration Function
Pre-build/Post-build Command
The pre/post build command can be set by CMake function mcux_add_custom_command, please refer to CMake Extension Pre/Post Build Command
IDE Option Setting
The IDE option setting is set in IDE.yml. The option is set by the SETTING: VALUE hash data structure in yml format. For more details, please refer to IDE Option
Keil MDK
Supported option for MDK are:
Update Target before Debugging for Keil
SETTING: update-before-debug
VALUE: true or false
For example:
mdk: update-before-debug: true
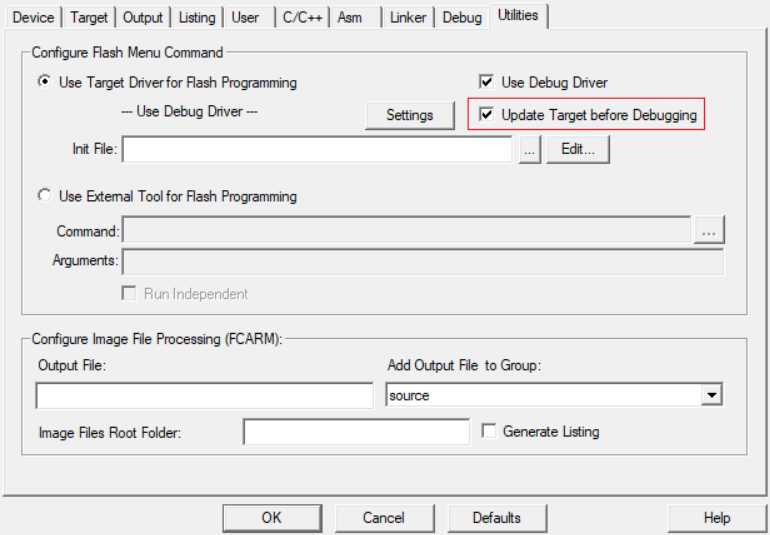
Load Application at Startup for Keil
SETTING: load_application
VALUE: true or false
For example:
mdk: load_application: true
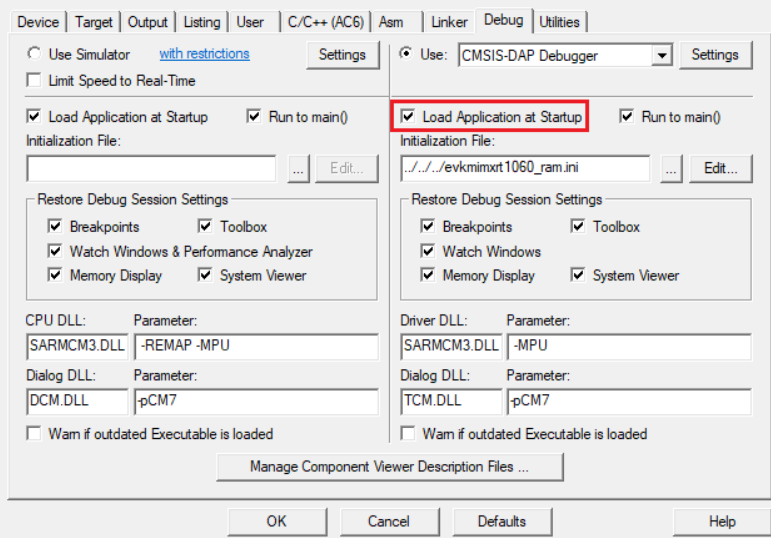
Set Periodic Window Update for Keil
SETTING: periodic_update
VALUE: true or false
For example:
mdk: periodic_update: true
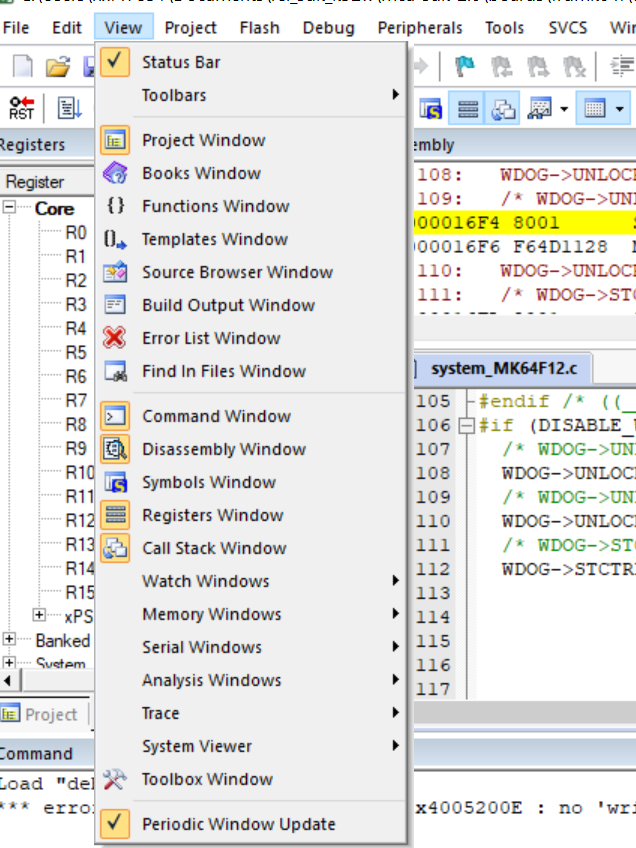
IAR
Supported option for IAR are:
Debugger Extra Options
SETTING: debugger_extra_options
VALUE: Specific settings
For example:
iar: debugger_extra_options: - "--macro_param enable_core=1"
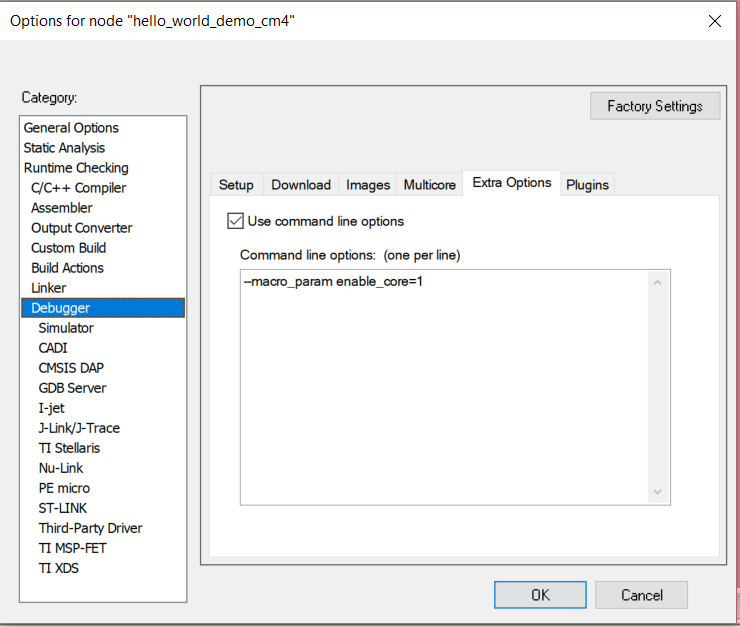
Download Extra Image
For multicore project, usually there are extra image needed when debugging, IAR support this setting, you can use
download-extra-imageto configure. For exampleiar: debug: download-extra-image: - path: ../../hello_world_ns/iar/debug/hello_world_ns.out offset: 0x0 debug_info_only: false
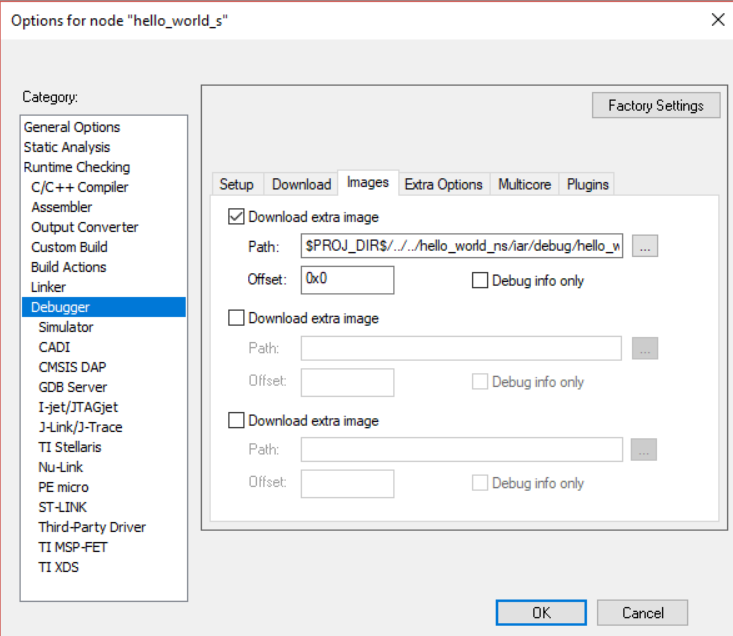
IDE Script Setting
The IDE script is set in IDE.yml. To record a script in yml, you should set at least the following properties:
source: The path of the script, it should be a path relative to ${SdkRootDirPath}
attribute: Mark the attribute of the script, help IDE know how to use it
toolchains: Indicates which toolchain this file should be used by
Besides, if the script is for specific target, like ram_0x1400_debug, you should add “targets” property.
Supported attributes will be introduced in the following sections.
Keil MDK
Supported attribute for script files are:
initialization_file
For example:
initialization_file: files: - source: boards/${board}/evkbmimxrt1170_ram_cm4_0x1400.ini targets: ram_0x1400_debug ram_0x1400_release attribute: initialization_file toolchains: mdk
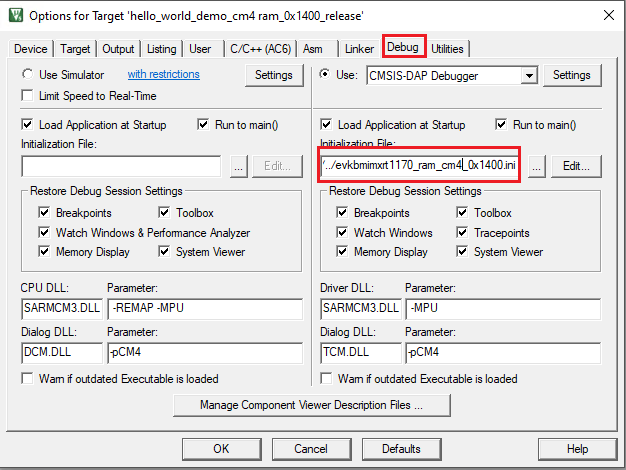
flash_programming_file
For example
flash_programming_file: files: - source: boards/${board}/trustzone_examples/hello_world/hello_world_s/hello_world_flashdownload_debug.ini attribute: flash_programming_file toolchains: mdk targets: debug
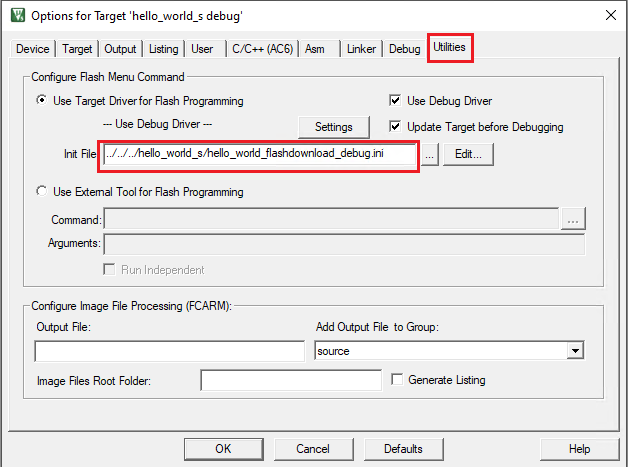
IAR
Supported attribute for script files are:
board-file
For example:
board-file: files: - source: boards/${board}/mbedtls3x_examples/mbedtls3x_psatest/mbedtls3x_psatest.board attribute: board-file toolchains: iar
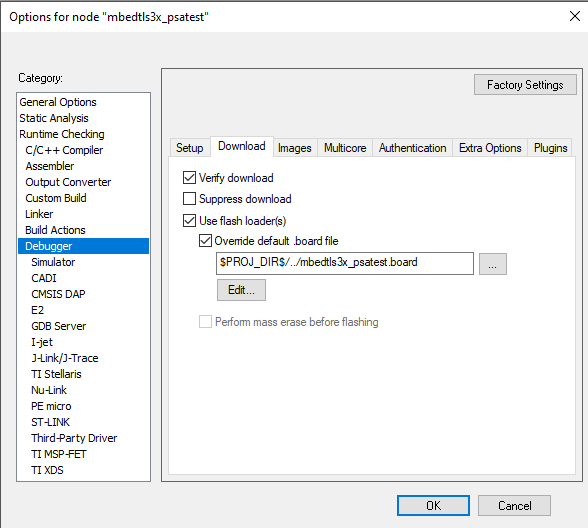
macro-file
For example
macro-file: files: - source: boards/${board}/evkmimxrt1064_sdram_init.mac targets: sdram_txt_debug sdram_txt_release toolchains: iar attribute: macro-file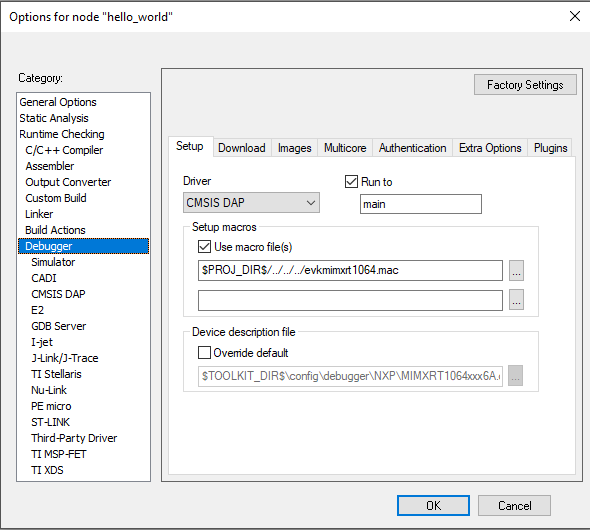
jlink_script_file
For example
jlink_script_file: files: - source: boards/${board}/evkbimxrt1050_sdram_init.jlinkscript attribute: jlink_script_file toolchains: iar targets: sdram_debug sdram_release
IDE language Setting
For GUI project, project language can be set to “c” or “cpp” in IDE.yml with “project_language” field. If not set, the default is c. For IAR C++ project, generally you can set project language to “auto” to let the compiler decide how to compile.
For example:
iar:
project_language: auto
mdk:
project_language: cpp