RPMSG-Lite Design Considerations
This document outlines important design considerations when integrating the RPMSG-Lite middleware into your multicore application. Following these guidelines will help you avoid common pitfalls and ensure reliable inter-processor communication.
Table of Contents
1. Initialization Sequence
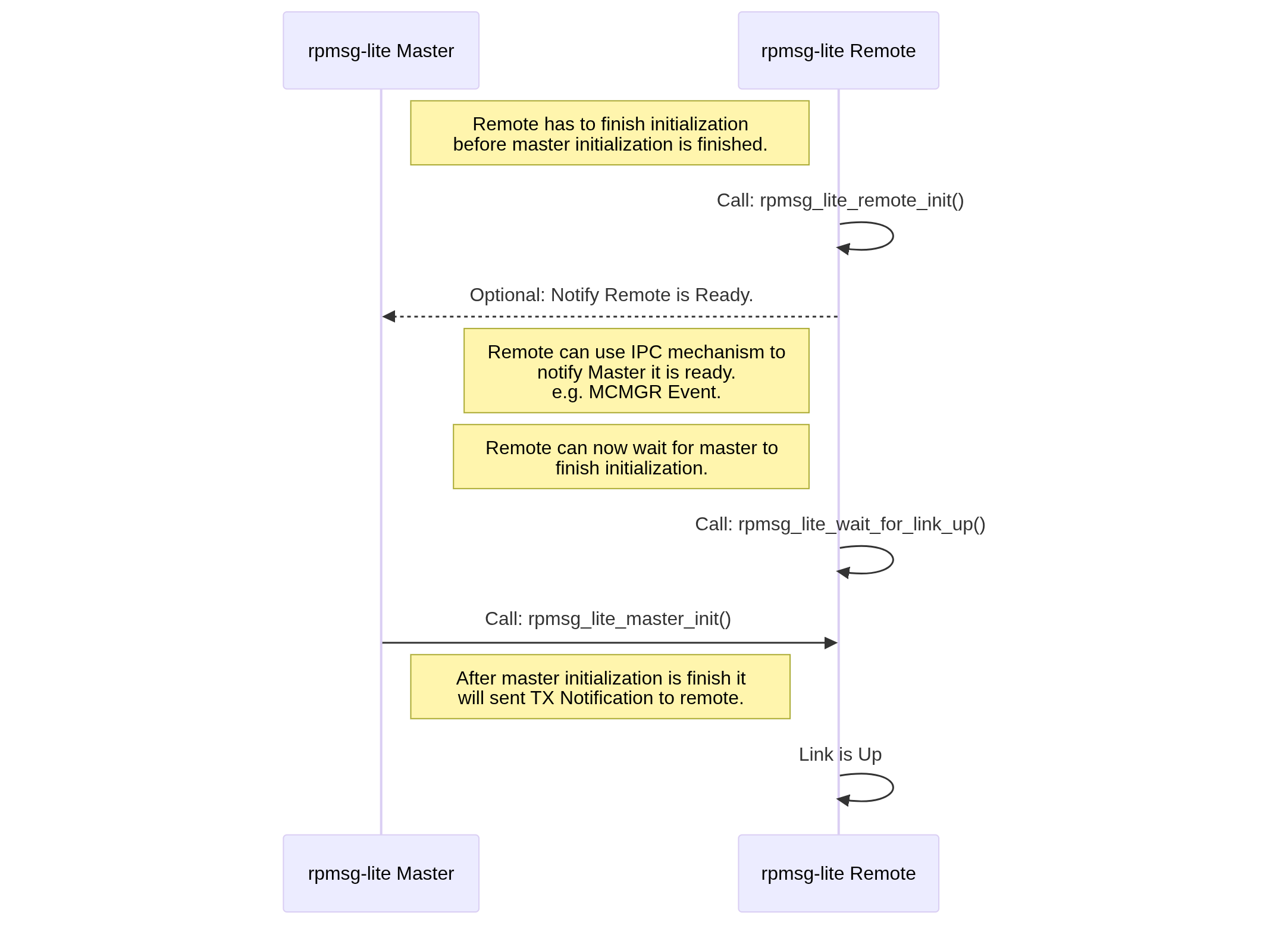
The order of initialization between master and remote processors is critical:
Mermaid source (click to expand)
sequenceDiagram
participant MasterRPMsg as rpmsg-lite Master
participant RemoteRPMsg as rpmsg-lite Remote
RemoteRPMsg->>RemoteRPMsg: Call: rpmsg_lite_remote_init()
RemoteRPMsg->>RemoteRPMsg: Call: rpmsg_lite_wait_for_link_up()
MasterRPMsg->>RemoteRPMsg: Call: rpmsg_lite_master_init()
RemoteRPMsg->>RemoteRPMsg: Link is Up
MasterRPMsg->>MasterRPMsg: Call: rpmsg_ns_bind()
Note right of MasterRPMsg: NS Bind has to create Endpoint before<br> Remote calls ns announce.
RemoteRPMsg->>MasterRPMsg: Call: rpmsg_ns_announce()
Key considerations:
The remote processor must initialize its RPMSG-Lite instance and set up interrupt handlers before the master initializes.
If the remote is not ready to receive the initial notification from the master, it may get stuck in an infinite loop waiting for a connection.
The master is responsible for setting up the shared memory and VirtIO rings.
Both sides must use compatible configuration parameters (buffer sizes, counts, etc.).
Application-level synchronization between cores is recommended:
A IPC mechanism like MCMGR (Multicore Manager) should be used to signal when the remote core is ready
The master core should wait for this signal before initializing its RPMSG-Lite instance
Example code pattern:
/* On master core */ /* Register for remote core ready event */ MCMGR_RegisterEvent(kMCMGR_RemoteApplicationEvent, eventHandler, &readyEventData); /* Wait until remote core signals it's ready */ while (APP_RPMSG_READY_EVENT_DATA != readyEventData) {}; /* Now safe to initialize RPMSG-Lite master */ my_rpmsg = rpmsg_lite_master_init(...);
2. Named Service (NS) Endpoint Handling
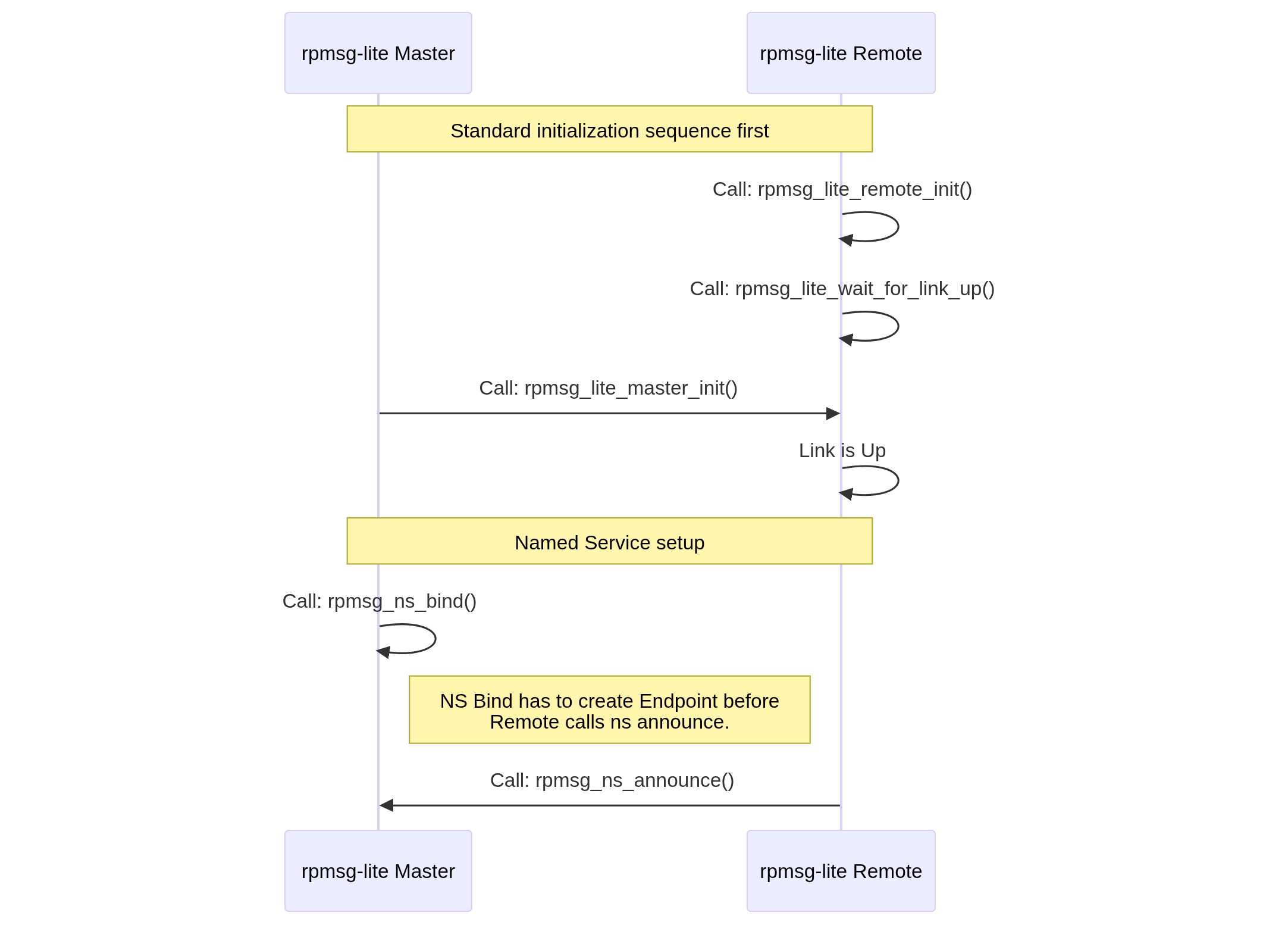
When using Named Services for dynamic endpoint discovery:
Mermaid source (click to expand)
sequenceDiagram
participant MasterRPMsg as rpmsg-lite Master
participant RemoteRPMsg as rpmsg-lite Remote
Note over RemoteRPMsg,MasterRPMsg: Standard initialization sequence first
RemoteRPMsg->>RemoteRPMsg: Call: rpmsg_lite_remote_init()
RemoteRPMsg->>RemoteRPMsg: Call: rpmsg_lite_wait_for_link_up()
MasterRPMsg->>RemoteRPMsg: Call: rpmsg_lite_master_init()
RemoteRPMsg->>RemoteRPMsg: Link is Up
Note over RemoteRPMsg,MasterRPMsg: Named Service setup
MasterRPMsg->>MasterRPMsg: Call: rpmsg_ns_bind()
Note right of MasterRPMsg: NS Bind has to create Endpoint before<br> Remote calls ns announce.
RemoteRPMsg->>MasterRPMsg: Call: rpmsg_ns_announce()
Key considerations:
Initialization order matters: Complete the standard RPMSG-Lite initialization sequence before setting up Named Services.
Master must bind first: Call
rpmsg_ns_bind()on the master before the remote callsrpmsg_ns_announce().Service discovery flow:
Master registers for NS announcements using
rpmsg_ns_bind(callback)Remote announces available services using
rpmsg_ns_announce(service_name)Master’s NS callback is invoked when services are announced
Master can then create endpoints to communicate with the announced services
Service names must match between the announcing (remote) and binding (master) sides.
Example code pattern:
/* On master core */
/* Bind to named service announcements */
rpmsg_ns_bind(my_rpmsg, app_nameservice_isr_cb, NULL);
/* On remote core */
/* Announce a service */
rpmsg_ns_announce(my_rpmsg, my_ept, "service_name", RL_NS_CREATE);
3. Buffer Management
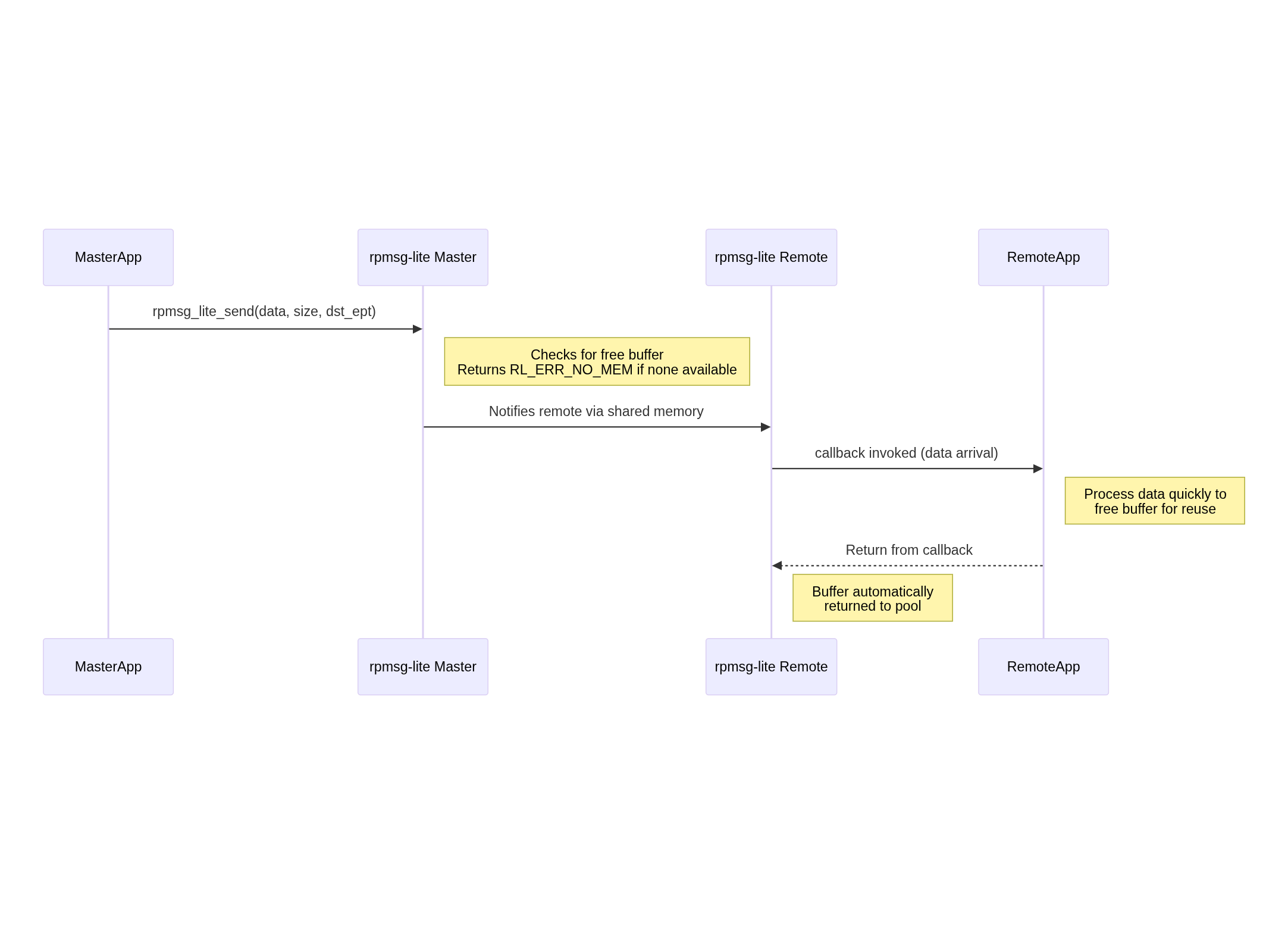
Understanding buffer management is crucial for preventing resource exhaustion:
Mermaid source (click to expand)
sequenceDiagram
participant MasterApp
participant MasterRPMsg as rpmsg-lite Master
participant RemoteRPMsg as rpmsg-lite Remote
participant RemoteApp
MasterApp->>MasterRPMsg: rpmsg_lite_send(data, size, dst_ept)
Note right of MasterRPMsg: Checks for free buffer<br>Returns RL_ERR_NO_MEM if none available
MasterRPMsg->>RemoteRPMsg: Notifies remote via shared memory
RemoteRPMsg->>RemoteApp: callback invoked (data arrival)
Note right of RemoteApp: Process data quickly to<br>free buffer for reuse
RemoteApp-->>RemoteRPMsg: Return from callback
Note right of RemoteRPMsg: Buffer automatically<br>returned to pool
Key considerations:
Buffers are a shared resource with a fixed count defined at initialization time.
When
rpmsg_lite_send()is called, it returnsRL_ERR_NO_MEMif no free buffers are available.Buffers are automatically returned to the pool when the receive callback completes.
Long processing in receive callbacks can lead to buffer exhaustion.
Consider using a message queue to offload processing from the callback to prevent buffer starvation.
The total number of buffers is defined by
RL_BUFFER_COUNTand should be sized appropriately for your application’s traffic patterns.
4. Callback Handling
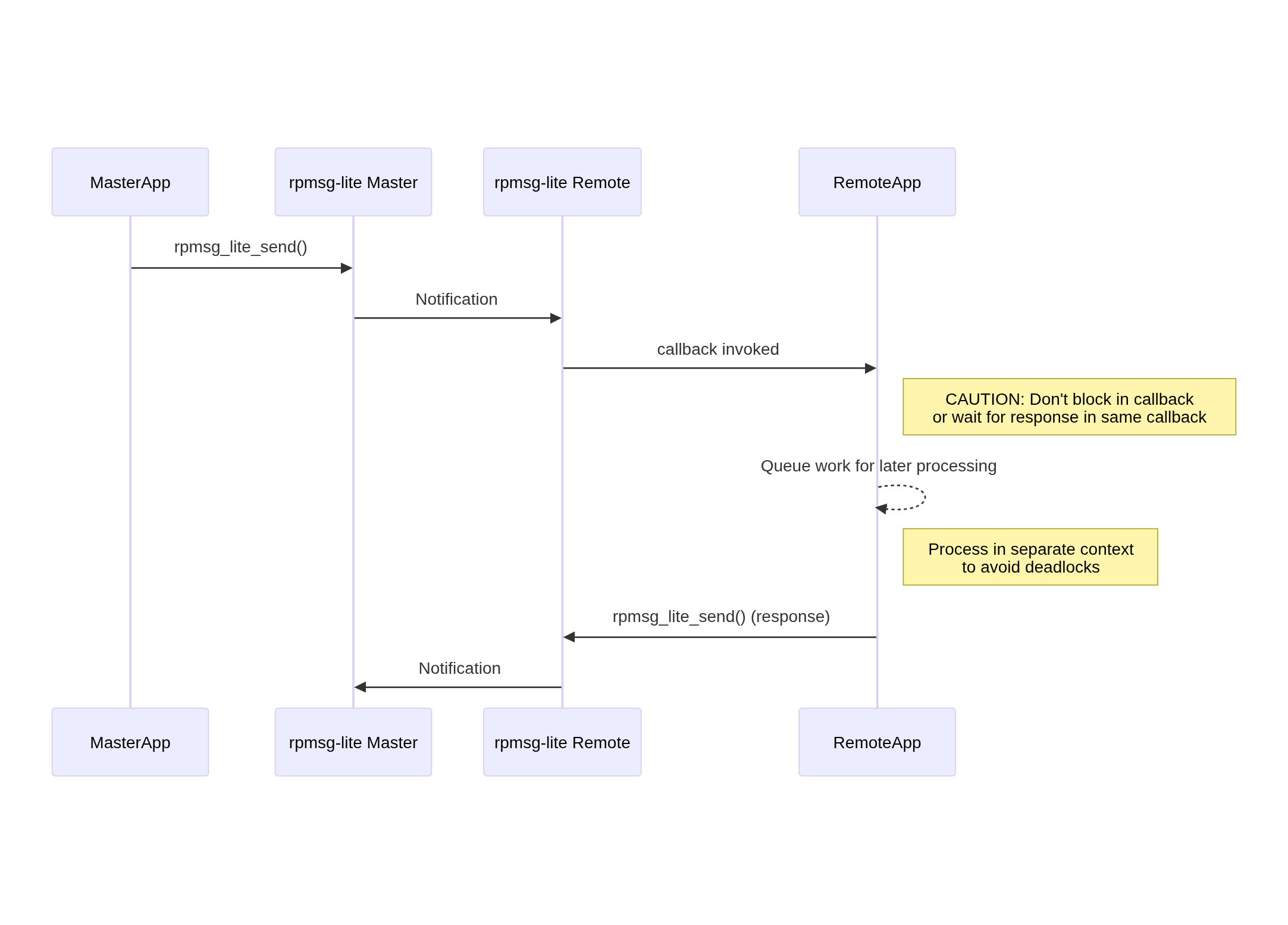
Proper callback handling is essential to avoid deadlocks and ensure responsive communication:
Mermaid source (click to expand)
sequenceDiagram
participant MasterApp
participant MasterRPMsg as rpmsg-lite Master
participant RemoteRPMsg as rpmsg-lite Remote
participant RemoteApp
MasterApp->>MasterRPMsg: rpmsg_lite_send()
MasterRPMsg->>RemoteRPMsg: Notification
RemoteRPMsg->>RemoteApp: callback invoked
Note right of RemoteApp: CAUTION: Don't block in callback<br>or wait for response in same callback
RemoteApp-->>RemoteApp: Queue work for later processing
Note right of RemoteApp: Process in separate context<br>to avoid deadlocks
RemoteApp->>RemoteRPMsg: rpmsg_lite_send() (response)
RemoteRPMsg->>MasterRPMsg: Notification
Key considerations:
Callbacks are typically executed in interrupt context, so they should be kept short and non-blocking.
Never call
rpmsg_lite_send()and wait for a response within the same callback - this can lead to deadlocks.Use a queue or task notification mechanism to defer processing to a separate context.
If using an RTOS, consider using a message queue to pass the received data to a processing task.
In bare-metal environments, set a flag in the callback and process the data in the main loop.
5. Shutdown Considerations
Proper shutdown sequence helps prevent resource leaks and system instability:
Key considerations:
Delete all endpoints before destroying the RPMSG-Lite instance.
Ensure all pending operations are complete before shutdown.
Coordinate shutdown between master and remote to prevent one side from sending messages to a destroyed endpoint.
For NS endpoints, consider announcing service removal before shutdown.
Release all allocated resources, including any OS-specific objects (mutexes, queues, etc.).
If the system will restart communication, ensure proper cleanup to avoid stale state.
6. Thread Safety
Ensuring thread safety is critical in multi-threaded environments:
Key considerations:
RPMSG-Lite provides internal synchronization for its data structures.
However, application-level synchronization may be needed when multiple tasks use the same endpoint.
Avoid calling
rpmsg_lite_send()concurrently from multiple threads using the same endpoint.Be careful with shared data accessed from both application context and callback context.
In RTOS environments, use appropriate synchronization primitives (mutexes, semaphores) to protect shared resources.
Be aware of priority inversion issues if callbacks execute at different priority levels.
Consider using a dedicated task for handling all RPMSG-Lite communication to simplify synchronization.