|
ISSDK
1.7
IoT Sensing Software Development Kit
|
|
ISSDK
1.7
IoT Sensing Software Development Kit
|
#include <sensor_fusion.h>
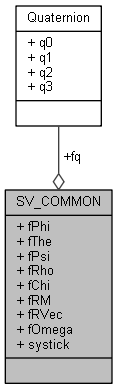
Data Fields | |
| float | fPhi |
| roll (deg) More... | |
| float | fThe |
| pitch (deg) More... | |
| float | fPsi |
| yaw (deg) More... | |
| float | fRho |
| compass (deg) More... | |
| float | fChi |
| tilt from vertical (deg) More... | |
| float | fRM [3][3] |
| orientation matrix More... | |
| Quaternion | fq |
| orientation quaternion More... | |
| float | fRVec [3] |
| rotation vector More... | |
| float | fOmega [3] |
| average angular velocity (deg/s) More... | |
| int32_t | systick |
| systick timer; More... | |
Excluding SV_1DOF_P_BASIC, Any of the SV_ fusion structures above could be cast to type SV_COMMON for dereferencing.
Definition at line 461 of file sensor_fusion.h.
| float fChi |
tilt from vertical (deg)
Definition at line 466 of file sensor_fusion.h.
| float fOmega[3] |
average angular velocity (deg/s)
Definition at line 470 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().
| float fPhi |
roll (deg)
Definition at line 462 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().
| float fPsi |
yaw (deg)
Definition at line 464 of file sensor_fusion.h.
| Quaternion fq |
orientation quaternion
Definition at line 468 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().
| float fRho |
compass (deg)
Definition at line 465 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().
| float fRM[3][3] |
orientation matrix
Definition at line 467 of file sensor_fusion.h.
| float fRVec[3] |
rotation vector
Definition at line 469 of file sensor_fusion.h.
| float fThe |
pitch (deg)
Definition at line 463 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().
| int32_t systick |
systick timer;
Definition at line 471 of file sensor_fusion.h.
Referenced by readAlgoParams(), and readCommon().