|
ISSDK
1.8
IoT Sensing Software Development Kit
|
|
ISSDK
1.8
IoT Sensing Software Development Kit
|
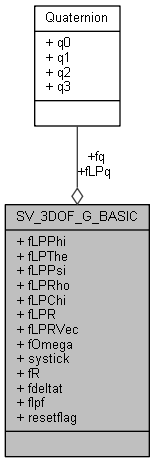
This is the 3DOF basic accelerometer state vector structure. More...
#include <sensor_fusion.h>
Data Fields | |
| float | fLPPhi |
| low pass roll (deg) More... | |
| float | fLPThe |
| low pass pitch (deg) More... | |
| float | fLPPsi |
| low pass yaw (deg) More... | |
| float | fLPRho |
| low pass compass (deg) More... | |
| float | fLPChi |
| low pass tilt from vertical (deg) More... | |
| float | fLPR [3][3] |
| low pass filtered orientation matrix More... | |
| Quaternion | fLPq |
| low pass filtered orientation quaternion More... | |
| float | fLPRVec [3] |
| rotation vector More... | |
| float | fOmega [3] |
| angular velocity (deg/s) More... | |
| int32_t | systick |
| systick timer More... | |
| float | fR [3][3] |
| unfiltered orientation matrix More... | |
| Quaternion | fq |
| unfiltered orientation quaternion More... | |
| float | fdeltat |
| fusion time interval (s) More... | |
| float | flpf |
| low pass filter coefficient More... | |
| int8_t | resetflag |
| flag to request re-initialization on next pass More... | |
This is the 3DOF basic accelerometer state vector structure.
Definition at line 271 of file sensor_fusion.h.
| float fdeltat |
fusion time interval (s)
Definition at line 287 of file sensor_fusion.h.
Referenced by fInit_3DOF_G_BASIC(), and fRun_3DOF_G_BASIC().
| float fLPChi |
low pass tilt from vertical (deg)
Definition at line 278 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| float flpf |
low pass filter coefficient
Definition at line 288 of file sensor_fusion.h.
Referenced by fInit_3DOF_G_BASIC(), and fRun_3DOF_G_BASIC().
| float fLPPhi |
low pass roll (deg)
Definition at line 274 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| float fLPPsi |
low pass yaw (deg)
Definition at line 276 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| Quaternion fLPq |
low pass filtered orientation quaternion
Definition at line 280 of file sensor_fusion.h.
Referenced by fInit_3DOF_G_BASIC(), and fRun_3DOF_G_BASIC().
| float fLPR[3][3] |
low pass filtered orientation matrix
Definition at line 279 of file sensor_fusion.h.
Referenced by fInit_3DOF_G_BASIC(), and fRun_3DOF_G_BASIC().
| float fLPRho |
low pass compass (deg)
Definition at line 277 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| float fLPRVec[3] |
| float fLPThe |
low pass pitch (deg)
Definition at line 275 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| float fOmega[3] |
angular velocity (deg/s)
Definition at line 282 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| Quaternion fq |
unfiltered orientation quaternion
Definition at line 286 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| float fR[3][3] |
unfiltered orientation matrix
Definition at line 285 of file sensor_fusion.h.
Referenced by fRun_3DOF_G_BASIC().
| int8_t resetflag |
flag to request re-initialization on next pass
Definition at line 289 of file sensor_fusion.h.
Referenced by fInit_3DOF_G_BASIC(), and fRun_3DOF_G_BASIC().
| int32_t systick |