|
ISSDK
1.8
IoT Sensing Software Development Kit
|
|
ISSDK
1.8
IoT Sensing Software Development Kit
|
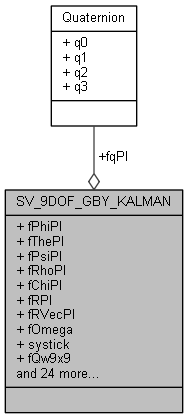
SV_9DOF_GBY_KALMAN is the 9DOF Kalman filter accelerometer, magnetometer and gyroscope state vector structure. More...
#include <sensor_fusion.h>
Data Fields | |
| float | fPhiPl |
| roll (deg) More... | |
| float | fThePl |
| pitch (deg) More... | |
| float | fPsiPl |
| yaw (deg) More... | |
| float | fRhoPl |
| compass (deg) More... | |
| float | fChiPl |
| tilt from vertical (deg) More... | |
| float | fRPl [3][3] |
| a posteriori orientation matrix More... | |
| Quaternion | fqPl |
| a posteriori orientation quaternion More... | |
| float | fRVecPl [3] |
| rotation vector More... | |
| float | fOmega [3] |
| average angular velocity (deg/s) More... | |
| int32_t | systick |
| systick timer; More... | |
| float | fQw9x9 [9][9] |
| covariance matrix Qw More... | |
| float | fK9x6 [9][6] |
| kalman filter gain matrix K More... | |
| float | fQwCT9x6 [9][6] |
| Qw.C^T matrix. More... | |
| float | fZErr [6] |
| measurement error vector More... | |
| float | fQv6x1 [6] |
| measurement noise covariance matrix leading diagonal More... | |
| float | fDeltaPl |
| a posteriori inclination angle from Kalman filter (deg) More... | |
| float | fsinDeltaPl |
| sin(fDeltaPl) More... | |
| float | fcosDeltaPl |
| cos(fDeltaPl) More... | |
| float | fqgErrPl [3] |
| gravity vector tilt orientation quaternion error (dimensionless) More... | |
| float | fqmErrPl [3] |
| geomagnetic vector tilt orientation quaternion error (dimensionless) More... | |
| float | fbPl [3] |
| gyro offset (deg/s) More... | |
| float | fbErrPl [3] |
| gyro offset error (deg/s) More... | |
| float | fAccGl [3] |
| linear acceleration (g) in global frame More... | |
| float | fVelGl [3] |
| velocity (m/s) in global frame More... | |
| float | fDisGl [3] |
| displacement (m) in global frame More... | |
| float | fdeltat |
| sensor fusion interval (s) More... | |
| float | fgdeltat |
| g (m/s2) * fdeltat More... | |
| float | fAlphaOver2 |
| PI / 180 * fdeltat / 2. More... | |
| float | fAlphaSqOver4 |
| (PI / 180 * fdeltat)^2 / 4 More... | |
| float | fAlphaSqQvYQwbOver12 |
| (PI / 180 * fdeltat)^2 * (QvY + Qwb) / 12 More... | |
| float | fAlphaQwbOver6 |
| (PI / 180 * fdeltat) * Qwb / 6 More... | |
| float | fQwbOver3 |
| Qwb / 3. More... | |
| float | fMaxGyroOffsetChange |
| maximum permissible gyro offset change per iteration (deg/s) More... | |
| int8_t | iFirstAccelMagLock |
| denotes that 9DOF orientation has locked to 6DOF eCompass More... | |
| int8_t | resetflag |
| flag to request re-initialization on next pass More... | |
SV_9DOF_GBY_KALMAN is the 9DOF Kalman filter accelerometer, magnetometer and gyroscope state vector structure.
Definition at line 392 of file sensor_fusion.h.
| float fAccGl[3] |
linear acceleration (g) in global frame
Definition at line 418 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fAlphaOver2 |
PI / 180 * fdeltat / 2.
Definition at line 423 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fAlphaQwbOver6 |
(PI / 180 * fdeltat) * Qwb / 6
Definition at line 426 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN().
| float fAlphaSqOver4 |
(PI / 180 * fdeltat)^2 / 4
Definition at line 424 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fAlphaSqQvYQwbOver12 |
(PI / 180 * fdeltat)^2 * (QvY + Qwb) / 12
Definition at line 425 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fbErrPl[3] |
gyro offset error (deg/s)
Definition at line 417 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fbPl[3] |
gyro offset (deg/s)
Definition at line 416 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fChiPl |
tilt from vertical (deg)
Definition at line 399 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fcosDeltaPl |
cos(fDeltaPl)
Definition at line 413 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fDeltaPl |
a posteriori inclination angle from Kalman filter (deg)
Definition at line 411 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fdeltat |
sensor fusion interval (s)
Definition at line 421 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fDisGl[3] |
displacement (m) in global frame
Definition at line 420 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fgdeltat |
g (m/s2) * fdeltat
Definition at line 422 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fK9x6[9][6] |
kalman filter gain matrix K
Definition at line 407 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fMaxGyroOffsetChange |
maximum permissible gyro offset change per iteration (deg/s)
Definition at line 428 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fOmega[3] |
average angular velocity (deg/s)
Definition at line 403 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fPhiPl |
| float fPsiPl |
| float fqgErrPl[3] |
gravity vector tilt orientation quaternion error (dimensionless)
Definition at line 414 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fqmErrPl[3] |
geomagnetic vector tilt orientation quaternion error (dimensionless)
Definition at line 415 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| Quaternion fqPl |
a posteriori orientation quaternion
Definition at line 401 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fQv6x1[6] |
measurement noise covariance matrix leading diagonal
Definition at line 410 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fQw9x9[9][9] |
covariance matrix Qw
Definition at line 406 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fQwbOver3 |
Qwb / 3.
Definition at line 427 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fQwCT9x6[9][6] |
| float fRhoPl |
| float fRPl[3][3] |
a posteriori orientation matrix
Definition at line 400 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fRVecPl[3] |
rotation vector
Definition at line 402 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| float fsinDeltaPl |
sin(fDeltaPl)
Definition at line 412 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fThePl |
| float fVelGl[3] |
velocity (m/s) in global frame
Definition at line 419 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| float fZErr[6] |
measurement error vector
Definition at line 409 of file sensor_fusion.h.
Referenced by fRun_6DOF_GY_KALMAN().
| int8_t iFirstAccelMagLock |
denotes that 9DOF orientation has locked to 6DOF eCompass
Definition at line 429 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| int8_t resetflag |
flag to request re-initialization on next pass
Definition at line 430 of file sensor_fusion.h.
Referenced by fInit_9DOF_GBY_KALMAN(), and fRun_6DOF_GY_KALMAN().
| int32_t systick |