Run a demo using Arm GCC
This section describes the steps to configure the command line Arm GCC tools to build, run, and debug demo applications and necessary driver libraries provided in the MCUXpresso SDK. The hello_world demo application targeted for i.MX 93 is used as an example, though these steps can be applied to any board, demo or example application in the MCUXpresso SDK.
Linux OS host
The following sections provide steps to run a demo compiled with Arm GCC on Linux host.
Set up toolchain
This section contains the steps to install the necessary components required to build and run a MCUXpresso SDK demo application with the Arm GCC toolchain, as supported by the MCUXpresso SDK.
Install GCC Arm embedded tool chain
Download and run the installer from launchpad.net/gcc-arm-embedded. This is the actual toolset (in other words, compiler, linker, and so on). The GCC toolchain should correspond to the latest supported version, as described in the MCUXpresso SDK Release Notes (document MCUXSDKRN).
Note: See Host setup for Linux OS before compiling the application.
Parent topic:Set up toolchain
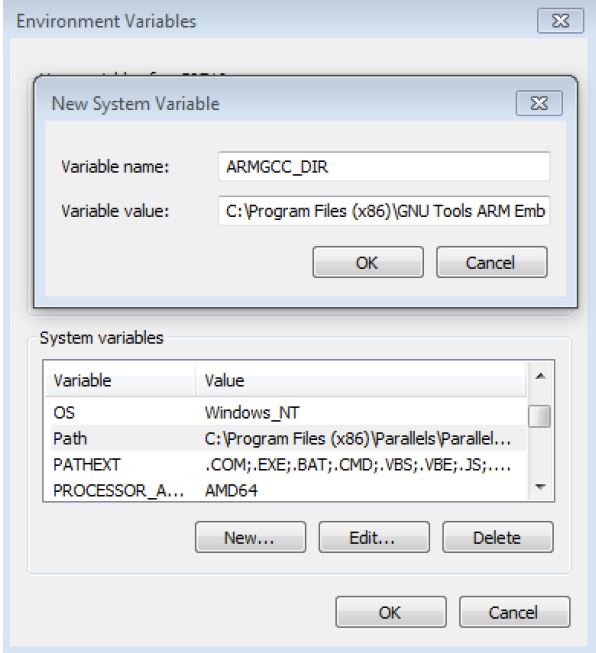
Add a new system environment variable for ARMGCC_DIR
Create a new system environment variable and name it ARMGCC_DIR. The value of this variable should point to the Arm GCC Embedded tool chain installation path. For this example, the path is:
$ export ARMGCC_DIR=/work/platforms/tmp/gcc-arm-none-eabi-9-2019-q4-major
$ export PATH= $PATH:/work/platforms/tmp/gcc-arm-none-eabi-9-2019-q4-major
Parent topic:Set up toolchain
Parent topic:Linux OS host
Build an example application
To build an example application, follow these steps.
Change the directory to the example application project directory, which has a path similar to the following:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc.For this example, the exact path is:
<install_dir>/boards/mcimx93autoevk/demo_apps/hello_world/armgcc.Run the
build_debug.shscript on the command line to perform the build. The output is shown as below:$ ./build_debug.sh -- TOOLCHAIN_DIR: /work/platforms/tmp/gcc-arm-none-eabi-9-2019-q4-major -- BUILD_TYPE: debug -- TOOLCHAIN_DIR: /work/platforms/tmp/gcc-arm-none-eabi-9-2019-q4-major -- BUILD_TYPE: debug -- The ASM compiler identification is GNU -- Found assembler: /work/platforms/tmp/gcc-arm-none-eabi-8-2019-q3-update/bin/arm-none-eabi-gcc -- Configuring done -- Generating done -- Build files have been written to: /work/platforms/tmp/nxp/MCIMX93AUTO\_EVK/boards/mcimx93autoevk/demo\_apps/hello\_world/armgcc/demo\_apps/hello\_world/armgcc Scanning dependencies of target hello_world.elf \[ 6%\] Building C object CMakeFiles/hello\_world.elf.dir/work/platforms/tmp/nxp/MCIMX93AUTO\_EVK/boards/mcimx93autoevk/demo\_apps/hello\_world/hello\_world.c.obj < -- skipping lines -- > [100%] Linking C executable debug/hello_world.elf [100%] Built target hello_world.elf
Parent topic:Linux OS host
Run an example application
To run a demo application using J-Link GDB Server application, perform the following steps.
Connect the development platform to your PC via USB cable between the DBG USB connector (J26) and the PC USB connector.
Connect 12 V ~ 20 V power supply and J-Link Plus to the device.
Switch SW5[1:4] to the M core boot and ensure that the image is not available on the boot source. For example, 0b0101 for MicroSD boot. Keep the SD slot empty.
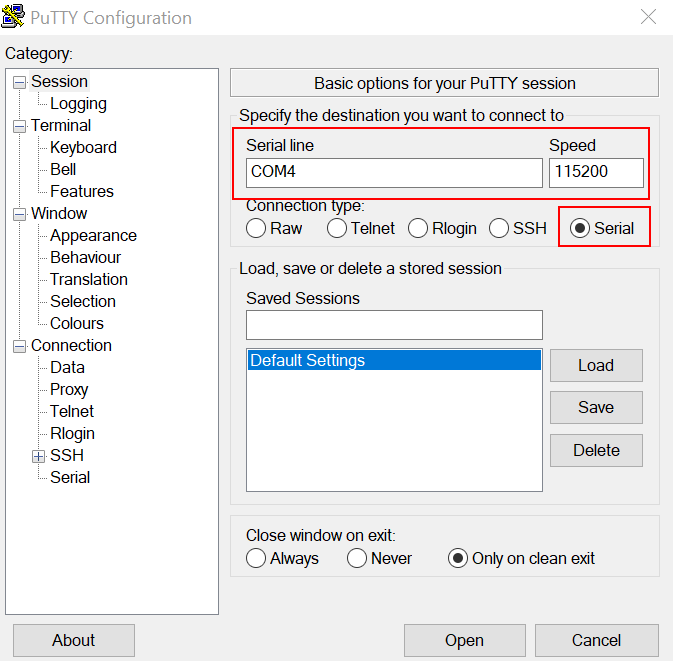
Open the terminal application on the PC, such as PuTTY or TeraTerm, connect to the debug COM port, see How to determine COM port, and configure the terminal with these settings:
115200 baud rate, depending on your board (reference
BOARD_DEBUG_UART_BAUDRATEvariable in theboard.hfile)No parity
8 data bits
1 stop bit
|
|
Power on the board.
Open the J-Link GDB Server application. Assuming the J-Link software is installed, the application can be launched from a new terminal for the MIMX9352_M33 device:
$ JLinkGDBServer -jlinkscriptfile /opt/SEGGER/JLink/Devices/NXP/iMX93/NXP_iMX93_Connect_CortexM33.JLinkScript -device MIMX9352_M33 -if SWD -----GDB Server start settings----- GDBInit file: none GDB Server Listening port: 2331 SWO raw output listening port: 2332 Terminal I/O port: 2333 Accept remote connection: localhost only Generate logfile: off Verify download: off Init regs on start: off Silent mode: off Single run mode: off Target connection timeout: 5000 ms ------J-Link related settings------ J-Link Host interface: USB J-Link script: Devices\NXP\iMX93\NXP_iMX93_Connect_CortexM33.JLinkScript J-Link settings file: none ------Target related settings------ Target device: MIMX9352_M33 Target interface: SWD Target interface speed: 4000kHz Target endian: little Connecting to J-Link... J-Link is connected. Firmware: J-Link V9 compiled May 7 2021 16:26:12 Hardware: V9.60 S/N: 59611220 Feature(s): RDI, GDB, FlashDL, FlashBP, JFlash Checking target voltage... Target voltage: 1.98 V Listening on TCP/IP port 2331 Connecting to target... Connected to target Waiting for GDB connection...
Change to the directory that contains the example application output. The output can be found in using one of these paths, depending on the build target selected:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/debug<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/releaseFor this example, the path is:
*<install\_dir\>/boards/mcimx93autoevk/demo\_apps/hello\_world/armgcc/debug*Start the GDB client:
$ arm-none-eabi-gdb hello_world.elf GNU gdb (GNU Tools for Arm Embedded Processors 9-2019-q4-major) 8.3.0.20190709-git Copyright (C) 2019 Free Software Foundation, Inc. License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html> This is free software: you are free to change and redistribute it. There is NO WARRANTY, to the extent permitted by law. Type "show copying" and "show warranty" for details. This GDB was configured as "--host=i686-w64-mingw32 --target=arm-none-eabi". Type "show configuration" for configuration details. For bug reporting instructions, please see: <http://www.gnu.org/software/gdb/bugs/>. Find the GDB manual and other documentation resources online at: <http://www.gnu.org/software/gdb/documentation/>. For help, type "help". Type "apropos word" to search for commands related to "word"... Reading symbols from hello_world.elf... (gdb)
Connect to the GDB server and load the binary by running the following commands:
target remote localhost:2331monitor resetmonitor haltload
(gdb) target remote localhost:2331 Remote debugging using localhost:2331 0x00000008 in \_\_isr\_vector \(\) (gdb) monitor reset Resetting target (gdb) monitor halt (gdb) load Loading section .interrupts, size 0x240 lma 0x0 Loading section .text, size 0x3ab8 lma 0x240 Loading section .ARM, size size 0x8 lma 0x3cf8 Loading section .init\_array, size 0x4 lma 0x3d00 Loading section .fini\_array, size 0x4 lma 0x3d04 Loading section .data, size 0x64 lma 0x3d08 Start address 0x2f4, load size 15724 Transfer rate: 264 KB/sec, 2620 bytes/write. \(gdb\)
The application is now downloaded and halted at the reset vector. Execute the monitor go command to start the demo application.
(gdb) monitor go
The hello_world application is now running and a banner is displayed on the terminal. If this is not true, check your terminal settings and connections.
|
|
Note: If the software is already running on the M core, the debugger loading image into TCM may get HardFault or a data verification issue. NXP recommends you to follow the steps above to use the debugger. Repowering the board is required to restart the debugger.
Parent topic:Linux OS host
Parent topic:Run a demo using Arm GCC
Windows OS host
The following sections provide steps to run a demo compiled with Arm GCC on Windows OS host.
Set up toolchain
This section contains the steps to install the necessary components required to build and run a MCUXpresso SDK demo application with the Arm GCC toolchain on Windows OS, as supported by the MCUXpresso SDK.
Install GCC Arm Embedded tool chain
Download and run the installer from GNU Arm Embedded Toolchain. This is the actual toolset (in other words, compiler, linker, and so on). The GCC toolchain should correspond to the latest supported version, as described in MCUXpresso SDK Release Notes.
Note: See Host setup for Windows OS before compiling the application.
Parent topic:Set up toolchain
Add a new system environment variable for ARMGCC_DIR
Create a new system environment variable and name it ARMGCC_DIR. The value of this variable should point to the Arm GCC Embedded tool chain installation path.
C:\Program Files (x86)\GNU Tools Arm Embedded\9 2019-q4-major
Reference the installation folder of the GNU Arm GCC Embedded tools for the exact path name.
|
|
Parent topic:Set up toolchain
Parent topic:Windows OS host
Build an example application
To build an example application, follow these steps.
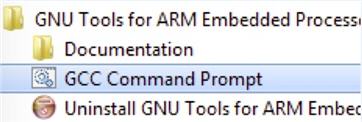
Open a GCC Arm Embedded tool chain command window. To launch the window, from the Windows operating system Start menu, go to Programs -> GNU Tools Arm Embedded <version> and select GCC Command Prompt.
|
|
Change the directory to the example application project directory, which has a path similar to the following:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc
For this example, the exact path is:
<install_dir>/boards/mcimx93autoevk/demo_apps/hello_world/armgcc
Type build_debug.bat on the command line or double click on the
build_debug.batfile in Windows Explorer to perform the build. The output is as shown in Figure 2.|

|
Parent topic:Windows OS host
Run an example application
This section describes steps to run a demo application using J-Link GDB Server application.
To perform this exercise, the following step must be done.
Connect the development platform to your PC via USB cable between the DBG USB connector (J26) and the PC USB connector.
Connect 12 V ~ 20 V power supply and J-Link Plus to the device.
Switch SW5[1:4] to the M core boot and ensure that the image is not available on the boot source. For example, 0b0101 for MicroSD boot. Keep the SD slot empty.
Open the terminal application on the PC, such as PuTTY or TeraTerm, connect to the debug COM port, see How to determine COM port, and configure the terminal with these settings:
115200 baud rate
No parity
8 data bits
1 stop bit
|
|
Power on the board.
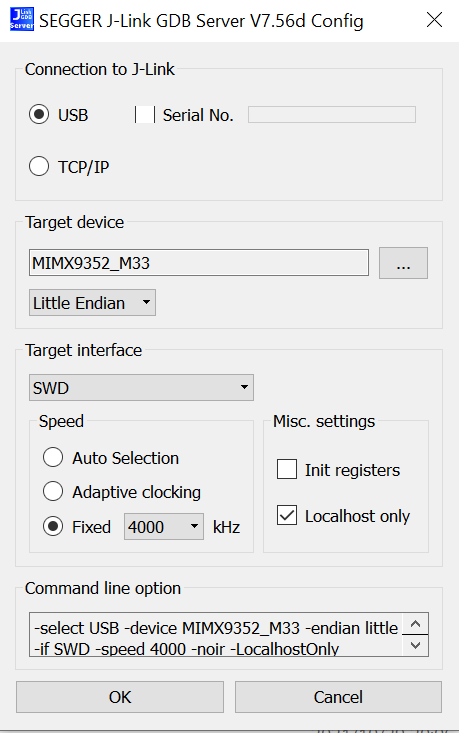
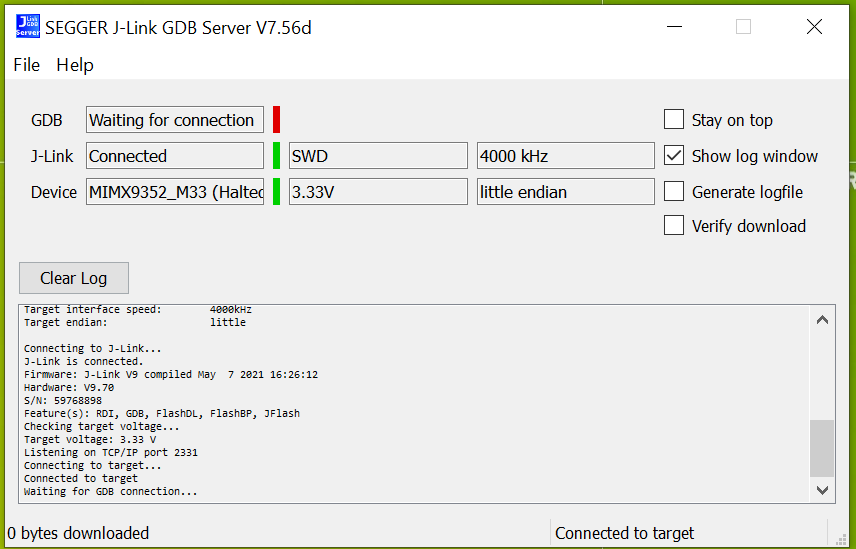
Open the J-Link GDB Server application. Assuming the J-Link software is installed, the application can be launched by going to the Windows operating system Start menu and selecting Programs -> SEGGER -> J-Link <version> J-Link GDB Server.
Modify the settings as shown in Figure 2. The target device selection chosen for this example is MIMX9352_M33 .
|
|
After GDB server is running, the screen should resemble Figure 3:
|
|
If not already running, open a GCC Arm Embedded tool chain command window. To launch the window, from the Windows operating system Start menu, go to Programs -> GNU Tools Arm Embedded <version> and select GCC Command Prompt.
|
|
Change to the directory that contains the example application output. The output can be found in using one of these paths, depending on the build target selected:
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/debug
<install_dir>/boards/<board_name>/<example_type>/<application_name>/armgcc/release
For this example, the path is:
<install_dir>/boards/mcimx93autoevk/demo_apps/hello_world/armgcc/debug
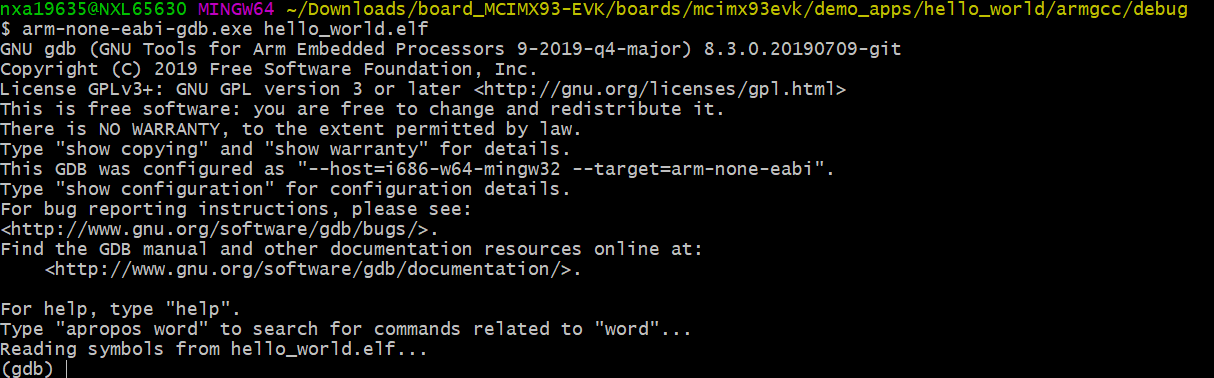
Run the command of
arm-none-eabi-gdb.exe <application_name>.elf. For this example, it isarm-none-eabi-gdb.exe hello_world.elf.|
|
Run these commands:
target remote localhost:2331monitor resetmonitor haltload
The application is now downloaded and halted at the reset vector. Execute the
monitor gocommand to start the demo application.
The hello_world application is now running and a banner is displayed on the terminal. If this is not true, check your terminal settings and connections.
|
|
Note: If the software is already running on the M core, the debugger loading image into TCM may get HardFault or a data verification issue. NXP recommends you to follow the steps above to use the debugger. Repowering the board is required to restart the debugger.
Parent topic:Windows OS host
Parent topic:Run a demo using Arm GCC