|
ISSDK
1.8
IoT Sensing Software Development Kit
|
|
ISSDK
1.8
IoT Sensing Software Development Kit
|
The mma9553_pedometer_spi.c file implements the ISSDK MMA9553L sensor driver example demonstration as a Pedometer in SPI Mode. More...
#include "pin_mux.h"#include "clock_config.h"#include "board.h"#include "fsl_lptmr.h"#include "fsl_debug_console.h"#include "Driver_SPI.h"#include "issdk_hal.h"#include "gpio_driver.h"#include "mma9553_drv.h"#include "systick_utils.h"
Go to the source code of this file.
Macros | |
| #define | SAMPLING_RATE_ms (100) /* Timeout for the ODR Timer. */ |
| #define | MMA9553_ACCEL_DATA_SIZE (6) /* 2 byte X,Y,Z Axis Data each. */ |
| #define | mma9553_en_callback LPTMR0_IRQHandler /* Timer timeout Callback. */ |
| #define | MMA9553_SSB_IO3 D10 /* The SSB_IO3 pin of MMA9553 on the FRDM-STBC-SA955x Board. */ |
| #define | RESET_GPIO A3 /* The RESET_GPIO pin of MMA9553 on the FRDM-STBC-SA955x Board. */ |
Functions | |
| void | mma9553_en_callback (void) |
| int | main (void) |
| Main function. More... | |
Variables | |
| const registercommandlist_t | cMma9553Config30Hz [] |
| const registerreadlist_t | cMma9553ReadRawOutput [] |
| const registercommandlist_t | cMma9553ReadPedometerCommand [] |
| const registerreadlist_t | cMma9553ReadPedometerOutput [] |
| volatile bool | gMma9553DataReady |
The mma9553_pedometer_spi.c file implements the ISSDK MMA9553L sensor driver example demonstration as a Pedometer in SPI Mode.
Definition in file mma9553_pedometer_spi.c.
| #define MMA9553_ACCEL_DATA_SIZE (6) /* 2 byte X,Y,Z Axis Data each. */ |
Definition at line 35 of file mma9553_pedometer_spi.c.
| #define mma9553_en_callback LPTMR0_IRQHandler /* Timer timeout Callback. */ |
Definition at line 36 of file mma9553_pedometer_spi.c.
Definition at line 37 of file mma9553_pedometer_spi.c.
Referenced by main().
Definition at line 38 of file mma9553_pedometer_spi.c.
Referenced by main().
| #define SAMPLING_RATE_ms (100) /* Timeout for the ODR Timer. */ |
Definition at line 34 of file mma9553_pedometer_spi.c.
Referenced by main().
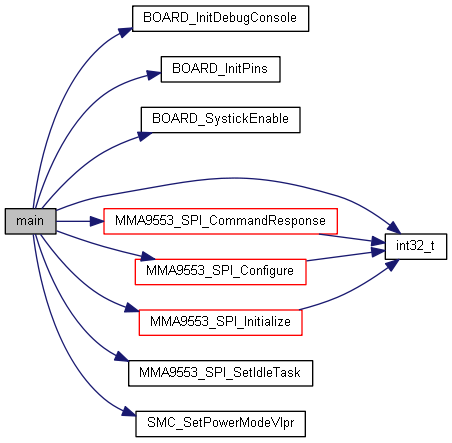
| int main | ( | void | ) |
Main function.
Initialize the MCU hardware
Initialize the SPI driver.
Set the SPI Power mode.
Set the SPI Slave speed.
Initialize the MMA9553 sensor driver.
Set the task to be executed while waiting for I2C transactions to complete.
Configure the MMA9553 sensor driver with 30Hz Mode settings.
Read the Pedometer data from the MMA9553.
Read the raw sensor data from the MMA9553.
Definition at line 81 of file mma9553_pedometer_spi.c.
References mma9553_acceldata_t::accel, ASK_USER_TO_RESUME, BOARD_BootClockRUN, BOARD_InitDebugConsole(), BOARD_InitPins(), BOARD_SystickEnable(), gMma9553DataReady, int32_t(), MMA9553_SPI_CommandResponse(), MMA9553_SPI_Configure(), MMA9553_SPI_Initialize(), MMA9553_SPI_SetIdleTask(), MMA9553_SSB_IO3, rawData, RESET_GPIO, SAMPLING_RATE_ms, SENSOR_ERROR_NONE, SMC, SMC_SetPowerModeVlpr(), SPI_S_BAUDRATE, SPI_S_DEVICE_INDEX, SPI_S_DRIVER, SPI_S_SIGNAL_EVENT, and status.
| void mma9553_en_callback | ( | void | ) |
Definition at line 72 of file mma9553_pedometer_spi.c.
References gMma9553DataReady.
| const registercommandlist_t cMma9553Config30Hz[] |
Prepare the register write list to configure MMA9553L in 30Hz Mode.
Definition at line 44 of file mma9553_pedometer_spi.c.
| const registercommandlist_t cMma9553ReadPedometerCommand[] |
Prepare the command list to read the Pedometer data from MMA9553.
Definition at line 56 of file mma9553_pedometer_spi.c.
| const registerreadlist_t cMma9553ReadPedometerOutput[] |
Prepare the read list to read the Pedometer data from MMA9553.
Definition at line 60 of file mma9553_pedometer_spi.c.
| const registerreadlist_t cMma9553ReadRawOutput[] |
Prepare the register read list to read the raw Accel data from MMA9553.
Definition at line 52 of file mma9553_pedometer_spi.c.
| volatile bool gMma9553DataReady |
Definition at line 66 of file mma9553_pedometer_spi.c.
Referenced by main(), and mma9553_en_callback().