|
ISSDK
1.8
IoT Sensing Software Development Kit
|
|
ISSDK
1.8
IoT Sensing Software Development Kit
|
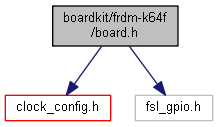
Go to the source code of this file.
Functions | |
| void | BOARD_InitDebugConsole (void) |
| #define BOARD_ACCEL_I2C_BASEADDR I2C0 |
Definition at line 129 of file board.h.
Referenced by BOARD_ConfigMPU(), BOARD_InitDebugConsole(), and BOARD_InitDebugConsole_Core1().
| #define BOARD_DEBUG_UART_BASEADDR (uint32_t) UART0 |
Definition at line 24 of file board.h.
Referenced by BOARD_InitDebugConsole().
| #define BOARD_DEBUG_UART_BAUDRATE 115200 |
Definition at line 31 of file board.h.
Referenced by BOARD_InitDebugConsole(), initializeControlPort(), and main().
| #define BOARD_DEBUG_UART_CLK_FREQ CLOCK_GetCoreSysClkFreq() |
Definition at line 26 of file board.h.
Referenced by BOARD_InitDebugConsole().
| #define BOARD_DEBUG_UART_CLKSRC SYS_CLK |
Definition at line 25 of file board.h.
Referenced by BOARD_InitDebugConsole().
| #define BOARD_DEBUG_UART_TYPE DEBUG_CONSOLE_DEVICE_TYPE_UART |
Definition at line 23 of file board.h.
Referenced by BOARD_InitDebugConsole().
| #define BOARD_LED_GREEN_GPIO_PIN 26U |
Definition at line 64 of file board.h.
Referenced by initializeStatusSubsystem().
| #define BOARD_LED_GREEN_GPIO_PORT PORTE |
Definition at line 63 of file board.h.
Referenced by initializeStatusSubsystem().
| #define BOARD_LED_RED_GPIO_PIN 22U |
Definition at line 61 of file board.h.
Referenced by initializeStatusSubsystem().
| #define BOARD_LED_RED_GPIO_PORT PORTB |
Definition at line 60 of file board.h.
Referenced by initializeStatusSubsystem().
| #define BOARD_SDHC_CD_GPIO_IRQ_HANDLER PORTB_IRQHandler |
| #define BOARD_SDHC_CD_PORT_IRQ_HANDLER PORTE_IRQHandler |
| #define BOARD_SDHC_CLK_FREQ CLOCK_GetFreq(kCLOCK_CoreSysClk) |
| #define BOARD_SW2_IRQ_HANDLER PORTC_IRQHandler |
| #define BOARD_SW3_IRQ_HANDLER PORTA_IRQHandler |
| #define ERPC_BOARD_DSPI_CLK_FREQ CLOCK_GetFreq(DSPI0_CLK_SRC) |
| #define ERPC_BOARD_DSPI_INT_PIN_IRQ_HANDLER PORTB_IRQHandler |
| #define LED_BLUE_INIT | ( | output | ) |
Enable target LED_BLUE
| #define LED_BLUE_OFF | ( | ) | GPIO_SetPinsOutput(BOARD_LED_BLUE_GPIO, 1U << BOARD_LED_BLUE_GPIO_PIN) |
| #define LED_BLUE_ON | ( | ) | GPIO_ClearPinsOutput(BOARD_LED_BLUE_GPIO, 1U << BOARD_LED_BLUE_GPIO_PIN) |
| #define LED_BLUE_TOGGLE | ( | ) | GPIO_TogglePinsOutput(BOARD_LED_BLUE_GPIO, 1U << BOARD_LED_BLUE_GPIO_PIN) |
| #define LED_GREEN_INIT | ( | output | ) |
Enable target LED_GREEN
Definition at line 84 of file board.h.
Referenced by initializeStatusSubsystem().
| #define LED_GREEN_OFF | ( | ) | GPIO_SetPinsOutput(BOARD_LED_GREEN_GPIO, 1U << BOARD_LED_GREEN_GPIO_PIN) |
| #define LED_GREEN_ON | ( | ) | GPIO_ClearPinsOutput(BOARD_LED_GREEN_GPIO, 1U << BOARD_LED_GREEN_GPIO_PIN) |
Turn on target LED_GREEN
Definition at line 89 of file board.h.
Referenced by process_host_command(), and ssSetLeds().
| #define LED_GREEN_TOGGLE | ( | ) | GPIO_TogglePinsOutput(BOARD_LED_GREEN_GPIO, 1U << BOARD_LED_GREEN_GPIO_PIN) |
| #define LED_RED_INIT | ( | output | ) |
Enable target LED_RED
Definition at line 69 of file board.h.
Referenced by initializeStatusSubsystem().
| #define LED_RED_OFF | ( | ) | GPIO_SetPinsOutput(BOARD_LED_RED_GPIO, 1U << BOARD_LED_RED_GPIO_PIN) |
| #define LED_RED_ON | ( | ) | GPIO_ClearPinsOutput(BOARD_LED_RED_GPIO, 1U << BOARD_LED_RED_GPIO_PIN) |
| #define LED_RED_TOGGLE | ( | ) | GPIO_TogglePinsOutput(BOARD_LED_RED_GPIO, 1U << BOARD_LED_RED_GPIO_PIN) |
| #define LLWU_SW_GPIO BOARD_SW2_GPIO |
| #define LLWU_SW_GPIO_PIN BOARD_SW2_GPIO_PIN |
| #define LLWU_SW_IRQ BOARD_SW2_IRQ |
| #define LLWU_SW_IRQ_HANDLER BOARD_SW2_IRQ_HANDLER |
| #define LLWU_SW_NAME BOARD_SW2_NAME |
| #define LLWU_SW_PORT BOARD_SW2_PORT |
| #define LOGIC_LED_OFF 1U |
Definition at line 58 of file board.h.
Referenced by initializeStatusSubsystem().