|
ISSDK
1.7
IoT Sensing Software Development Kit
|
|
ISSDK
1.7
IoT Sensing Software Development Kit
|
The sensor_fusion.c file implements the top level programming interface. More...
#include <stdio.h>#include "sensor_fusion.h"#include "magnetic.h"#include "drivers.h"#include "sensor_drv.h"#include "status.h"#include "control.h"#include "fusion.h"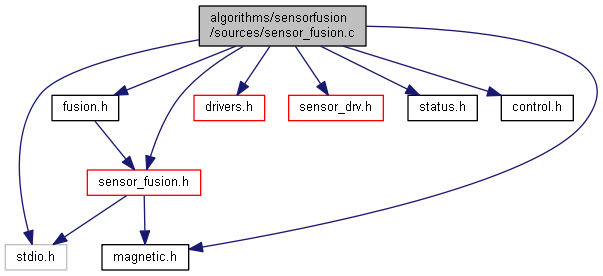
Go to the source code of this file.
Functions | |
| void | setStatus (SensorFusionGlobals *sfg, fusion_status_t status) |
| void | queueStatus (SensorFusionGlobals *sfg, fusion_status_t status) |
| void | updateStatus (SensorFusionGlobals *sfg) |
| void | testStatus (SensorFusionGlobals *sfg) |
| void | initSensorFusionGlobals (SensorFusionGlobals *sfg, StatusSubsystem *pStatusSubsystem, ControlSubsystem *pControlSubsystem) |
| utility function to insert default values in the top level structure More... | |
| int8_t | installSensor (SensorFusionGlobals *sfg, struct PhysicalSensor *pSensor, uint16_t addr, uint16_t schedule, void *bus_driver, registerDeviceInfo_t *busInfo, initializeSensor_t *initialize, readSensor_t *read) |
| int8_t | initializeSensors (SensorFusionGlobals *sfg) |
| void | processMagData (SensorFusionGlobals *sfg) |
| int8_t | readSensors (SensorFusionGlobals *sfg, uint16_t read_loop_counter) |
| void | conditionSensorReadings (SensorFusionGlobals *sfg) |
| void | zeroArray (StatusSubsystem *pStatus, void *data, uint16_t size, uint16_t numElements, uint8_t check) |
| void | clearFIFOs (SensorFusionGlobals *sfg) |
| Function to clear FIFO at the end of each fusion computation. More... | |
| void | runFusion (SensorFusionGlobals *sfg) |
| void | initializeFusionEngine (SensorFusionGlobals *sfg) |
| void | conditionSample (int16_t sample[3]) |
| conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768). More... | |
| void | addToFifo (union FifoSensor *sensor, uint16_t maxFifoSize, int16_t sample[3]) |
| addToFifo is called from within sensor driver read functions More... | |
The sensor_fusion.c file implements the top level programming interface.
Definition in file sensor_fusion.c.
| void addToFifo | ( | union FifoSensor * | sensor, |
| uint16_t | maxFifoSize, | ||
| int16_t | sample[3] | ||
| ) |
addToFifo is called from within sensor driver read functions
addToFifo is called from within sensor driver read functions to transfer new readings into the sensor structure corresponding to accel, gyro or mag. This function ensures that the software FIFOs are not overrun.
example usage: if (status==SENSOR_ERROR_NONE) addToFifo((FifoSensor*) &(sfg->Mag), MAG_FIFO_SIZE, sample);
| sensor | pointer to structure of type AccelSensor, MagSensor or GyroSensor |
| maxFifoSize | the size of the software (not hardware) FIFO |
| sample | the sample to add |
Definition at line 548 of file sensor_fusion.c.
References FifoSensor::Accel, CHX, CHY, CHZ, AccelSensor::iFIFOCount, AccelSensor::iFIFOExceeded, and AccelSensor::iGsFIFO.
Referenced by FXLS8471Q_Read(), FXOS8700_Init(), FXOS8700_ReadMagData(), and MAG3110_Read().

| void clearFIFOs | ( | SensorFusionGlobals * | sfg | ) |
Function to clear FIFO at the end of each fusion computation.
| sfg | Global data structure pointer |
Definition at line 380 of file sensor_fusion.c.
References MagSensor::iFIFOCount, MagSensor::iFIFOExceeded, and SensorFusionGlobals::Mag.
Referenced by initializeFusionEngine(), initSensorFusionGlobals(), and runFusion().

| void conditionSample | ( | int16_t | sample[3] | ) |
conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768).
conditionSample ensures that we never encounter the maximum negative two's complement value for a 16-bit variable (-32768). This value cannot be negated, because the maximum positive value is +32767. We need the ability to negate to gaurantee that subsequent HAL operations can be run successfully.
| sample | 16-bit register value from triaxial sensor read |
Definition at line 536 of file sensor_fusion.c.
Referenced by FXLS8471Q_Read(), FXOS8700_Init(), FXOS8700_ReadMagData(), and MAG3110_Read().

| void conditionSensorReadings | ( | SensorFusionGlobals * | sfg | ) |
conditionSensorReadings() transforms raw software FIFO readings into forms that can be consumed by the sensor fusion engine. This include sample averaging and (in the case of the gyro) integrations, applying hardware abstraction layers, and calibration functions. This function is normally involved via the "sfg." global pointer.
| sfg | Global data structure pointer |
Definition at line 322 of file sensor_fusion.c.
References MagSensor::isEnabled, SensorFusionGlobals::Mag, and processMagData().
Referenced by initSensorFusionGlobals().


| void initializeFusionEngine | ( | SensorFusionGlobals * | sfg | ) |
This function is responsible for initializing the system prior to starting the main fusion loop. This function is normally involved via the "sfg." global pointer.
Definition at line 488 of file sensor_fusion.c.
References ControlSubsystem::AccelCalPacketOn, ARM_systick_delay_ms(), ARM_systick_enable(), clearFIFOs(), CORE_SYSTICK_HZ, ControlSubsystem::DefaultQuaternionPacketType, F_3DOF_B_BASIC, F_3DOF_Y_BASIC, F_6DOF_GB_BASIC, F_6DOF_GY_KALMAN, F_9DOF_GBY_KALMAN, fInitializeAccelCalibration(), fInitializeFusion(), fInitializeMagCalibration(), HARD_FAULT, SensorFusionGlobals::iFlags, initializeSensors(), INITIALIZING, SensorFusionGlobals::loopcounter, SensorFusionGlobals::MagBuffer, SensorFusionGlobals::MagCal, NORMAL, SensorFusionGlobals::pControlSubsystem, Q3, Q3G, Q3M, Q6AG, Q6MA, Q9, ControlSubsystem::QuaternionPacketType, SENSOR_ERROR_NONE, SensorFusionGlobals::setStatus, and status.
Referenced by initSensorFusionGlobals().


| int8_t initializeSensors | ( | SensorFusionGlobals * | sfg | ) |
Definition at line 171 of file sensor_fusion.c.
References ControlSubsystem::AccelCalPacketOn, ApplyAccelHAL(), CHX, CHZ, fInvertAccelCal(), fUpdateAccelBuffer(), PhysicalSensor::initialize, PhysicalSensor::next, SensorFusionGlobals::pControlSubsystem, SensorFusionGlobals::pSensors, SensorFusionGlobals::setStatus, sfg, SOFT_FAULT, and status.
Referenced by initializeFusionEngine().


| void initSensorFusionGlobals | ( | SensorFusionGlobals * | sfg, |
| StatusSubsystem * | pStatusSubsystem, | ||
| ControlSubsystem * | pControlSubsystem | ||
| ) |
utility function to insert default values in the top level structure
| sfg | Global data structure pointer |
| pStatusSubsystem | Status subsystem pointer |
| pControlSubsystem | Control subsystem pointer |
Definition at line 77 of file sensor_fusion.c.
References SensorFusionGlobals::applyPerturbation, ApplyPerturbation, clearFIFOs(), SensorFusionGlobals::clearFIFOs, conditionSensorReadings(), SensorFusionGlobals::conditionSensorReadings, F_1DOF_P_BASIC, F_3DOF_B_BASIC, F_3DOF_G_BASIC, F_3DOF_Y_BASIC, F_6DOF_GB_BASIC, F_6DOF_GY_KALMAN, F_9DOF_GBY_KALMAN, F_ALL_SENSORS, F_USING_ACCEL, F_USING_GYRO, F_USING_MAG, F_USING_PRESSURE, F_USING_TEMPERATURE, SensorFusionGlobals::iFlags, initializeFusionEngine(), SensorFusionGlobals::initializeFusionEngine, installSensor(), SensorFusionGlobals::installSensor, SensorFusionGlobals::iPerturbation, MagSensor::iWhoAmI, SensorFusionGlobals::loopcounter, SensorFusionGlobals::Mag, SensorFusionGlobals::pControlSubsystem, SensorFusionGlobals::pSensors, SensorFusionGlobals::pStatusSubsystem, queueStatus(), SensorFusionGlobals::queueStatus, readSensors(), SensorFusionGlobals::readSensors, runFusion(), SensorFusionGlobals::runFusion, setStatus(), SensorFusionGlobals::setStatus, SensorFusionGlobals::systick_I2C, SensorFusionGlobals::systick_Spare, testStatus(), SensorFusionGlobals::testStatus, updateStatus(), and SensorFusionGlobals::updateStatus.
Referenced by main().


| int8_t installSensor | ( | SensorFusionGlobals * | sfg, |
| struct PhysicalSensor * | pSensor, | ||
| uint16_t | addr, | ||
| uint16_t | schedule, | ||
| void * | bus_driver, | ||
| registerDeviceInfo_t * | busInfo, | ||
| initializeSensor_t * | initialize, | ||
| readSensor_t * | read | ||
| ) |
installSensor is used to instantiate a physical sensor driver into the sensor fusion system. This function is normally involved via the "sfg." global pointer.
| sfg | top level fusion structure |
| pSensor | pointer to structure describing physical sensor |
| addr | I2C address for sensor (if applicable) |
| schedule | Parameter to control sensor sampling rate |
| bus_driver | ISSDK sensor bus driver (usually KSDK I2C bus) |
| busInfo | information required for bus power management |
| initialize | pointer to sensor initialization function |
| read | pointer to sensor read function |
Definition at line 131 of file sensor_fusion.c.
References PhysicalSensor::addr, PhysicalSensor::bus_driver, PhysicalSensor::deviceInfo, registerDeviceInfo_t::deviceInstance, registerDeviceInfo_t::functionParam, registerDeviceInfo_t::idleFunction, PhysicalSensor::initialize, PhysicalSensor::next, spiSlaveSpecificParams_t::pReadPreprocessFN, SensorFusionGlobals::pSensors, spiSlaveSpecificParams_t::pTargetSlavePinID, spiSlaveSpecificParams_t::pWritePreprocessFN, PhysicalSensor::read, PhysicalSensor::schedule, PhysicalSensor::slaveParams, spiSlaveSpecificParams_t::spiCmdLen, and spiSlaveSpecificParams_t::ssActiveValue.
Referenced by initSensorFusionGlobals().

| void processMagData | ( | SensorFusionGlobals * | sfg | ) |
Definition at line 223 of file sensor_fusion.c.
References ApplyGyroHAL(), ApplyMagHAL(), CHX, CHZ, MagSensor::fBs, fInvertMagCal(), fRunMagCalibration(), MagSensor::fuTPerCount, MagSensor::iBs, MagSensor::iBsFIFO, MagSensor::iFIFOCount, MagSensor::iFIFOExceeded, MagCalibration::iMagBufferReadOnly, iUpdateMagBuffer(), SensorFusionGlobals::loopcounter, SensorFusionGlobals::Mag, SensorFusionGlobals::MagBuffer, SensorFusionGlobals::MagCal, SensorFusionGlobals::setStatus, and SOFT_FAULT.
Referenced by conditionSensorReadings().


| void queueStatus | ( | SensorFusionGlobals * | sfg, |
| fusion_status_t | status | ||
| ) |
Poor man's inheritance for status subsystem queueStatus command. This function is normally involved via the "sfg." global pointer.
Definition at line 59 of file sensor_fusion.c.
References SensorFusionGlobals::pStatusSubsystem, and StatusSubsystem::queue.
Referenced by initSensorFusionGlobals().

| int8_t readSensors | ( | SensorFusionGlobals * | sfg, |
| uint16_t | read_loop_counter | ||
| ) |
readSensors traverses the linked list of physical sensors, calling the individual read functions one by one. This function is normally involved via the "sfg." global pointer.
| sfg | pointer to global sensor fusion data structure |
| read_loop_counter | current loop counter (used for multirate processing) |
Definition at line 293 of file sensor_fusion.c.
References HARD_FAULT, PhysicalSensor::isInitialized, PhysicalSensor::next, SensorFusionGlobals::pSensors, PhysicalSensor::read, PhysicalSensor::schedule, SENSOR_ERROR_INIT, SensorFusionGlobals::setStatus, and status.
Referenced by initSensorFusionGlobals().

| void runFusion | ( | SensorFusionGlobals * | sfg | ) |
runFusion the top level call that actually runs the sensor fusion. This is a utility function which manages the various defines in build.h. You should feel free to drop down a level and implement only those portions of fFuseSensors() that your application needs. This function is normally involved via the "sfg." global pointer.
Definition at line 403 of file sensor_fusion.c.
References clearFIFOs(), fFuseSensors(), SensorFusionGlobals::Mag, and SensorFusionGlobals::MagCal.
Referenced by initSensorFusionGlobals().


| void setStatus | ( | SensorFusionGlobals * | sfg, |
| fusion_status_t | status | ||
| ) |
Poor man's inheritance for status subsystem setStatus command This function is normally involved via the "sfg." global pointer.
Definition at line 52 of file sensor_fusion.c.
References SensorFusionGlobals::pStatusSubsystem, and StatusSubsystem::set.
Referenced by initSensorFusionGlobals().

| void testStatus | ( | SensorFusionGlobals * | sfg | ) |
Definition at line 71 of file sensor_fusion.c.
References SensorFusionGlobals::pStatusSubsystem, and StatusSubsystem::test.
Referenced by initSensorFusionGlobals().

| void updateStatus | ( | SensorFusionGlobals * | sfg | ) |
Poor man's inheritance for status subsystem updateStatus command. This function is normally involved via the "sfg." global pointer.
Definition at line 66 of file sensor_fusion.c.
References SensorFusionGlobals::pStatusSubsystem, and StatusSubsystem::update.
Referenced by initSensorFusionGlobals().

| void zeroArray | ( | StatusSubsystem * | pStatus, |
| void * | data, | ||
| uint16_t | size, | ||
| uint16_t | numElements, | ||
| uint8_t | check | ||
| ) |
| pStatus | Status subsystem pointer |
| data | pointer to array to be zeroed |
| size | data type size = 8, 16 or 32 |
| numElements | number of elements to zero out |
| check | true if you would like to verify writes, false otherwise |
Definition at line 337 of file sensor_fusion.c.
References data, HARD_FAULT, and StatusSubsystem::set.