|
ISSDK
1.8
IoT Sensing Software Development Kit
|
|
ISSDK
1.8
IoT Sensing Software Development Kit
|
Bare metal implementation of sensor fusion on FRDM-K64F. More...
#include "fsl_debug_console.h"#include "pin_mux.h"#include "clock_config.h"#include "board.h"#include "fsl_port.h"#include "fsl_pit.h"#include "fsl_i2c.h"#include "register_io_i2c.h"#include "fsl_i2c_cmsis.h"#include "fxas21002.h"#include "mpl3115.h"#include "fxos8700.h"#include "sensor_fusion.h"#include "control.h"#include "status.h"#include "drivers.h"#include "driver_pit.h"
Go to the source code of this file.
Functions | |
| int | main (void) |
| This is a bare-metal implementation of the NXP sensor fusion demo build. More... | |
Variables | |
| registerDeviceInfo_t | i2cBusInfo |
| SensorFusionGlobals | sfg |
| This is the primary sensor fusion data structure. More... | |
| struct ControlSubsystem | controlSubsystem |
| used for serial communications More... | |
| struct StatusSubsystem | statusSubsystem |
| provides visual (usually LED) status indicator More... | |
| struct PhysicalSensor | sensors [3] |
| This implementation uses up to 3 sensors. More... | |
Bare metal implementation of sensor fusion on FRDM-K64F.
This file shows the recommended way to incorporate sensor fusion capabilities into a bare metal (no RTOS) project.
Definition in file main_baremetal.c.
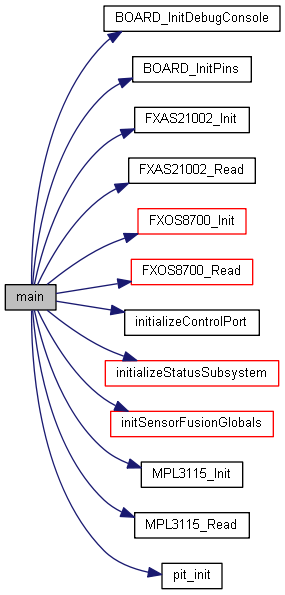
| int main | ( | void | ) |
This is a bare-metal implementation of the NXP sensor fusion demo build.
Definition at line 55 of file main_baremetal.c.
References SensorFusionGlobals::applyPerturbation, BOARD_BootClockRUN, BOARD_InitDebugConsole(), BOARD_InitPins(), SensorFusionGlobals::conditionSensorReadings, controlSubsystem, FUSION_HZ, FXAS21002_I2C_ADDR, FXAS21002_Init(), FXAS21002_Read(), FXOS8700_I2C_ADDR, FXOS8700_Init(), FXOS8700_Read(), I2C_S_DRIVER, I2C_S_SIGNAL_EVENT, I2Cdrv, initializeControlPort(), SensorFusionGlobals::initializeFusionEngine, initializeStatusSubsystem(), initSensorFusionGlobals(), SensorFusionGlobals::installSensor, SensorFusionGlobals::loopcounter, MPL3115_I2C_ADDR, MPL3115_Init(), MPL3115_Read(), NORMAL, SensorFusionGlobals::pControlSubsystem, pit_init(), pitIsrFlag, SensorFusionGlobals::queueStatus, SensorFusionGlobals::readSensors, SensorFusionGlobals::runFusion, sensors, SensorFusionGlobals::setStatus, statusSubsystem, ControlSubsystem::stream, sUARTOutputBuffer, and SensorFusionGlobals::updateStatus.
| struct ControlSubsystem controlSubsystem |
used for serial communications
Definition at line 50 of file main_baremetal.c.
Referenced by main().
| registerDeviceInfo_t i2cBusInfo |
Definition at line 42 of file main_baremetal.c.
| struct PhysicalSensor sensors[3] |
This implementation uses up to 3 sensors.
Definition at line 52 of file main_baremetal.c.
Referenced by main().
This is the primary sensor fusion data structure.
Definition at line 49 of file main_baremetal.c.
| struct StatusSubsystem statusSubsystem |
provides visual (usually LED) status indicator
Definition at line 51 of file main_baremetal.c.
Referenced by main().